GPS V1.1(SMA) Unit
GPS Unit v1.1 是一款 GNSS 全球定位导航单元,集成高性能 CASIC 导航芯片 AT6668 和信号放大器芯片 MAX2659,内置陶瓷天线,可提供更精确、更可靠的卫星定位服务。
GPS SMA Unit 是一款 GNSS 全球定位导航单元,集成了高性能 CASIC 导航芯片 AT6668 和信号放大器芯片 MAX2659。它使用外置天线,可提供更准确、更可靠的卫星定位服务。
支持以下产品:

MicroPython 应用示例:
1# SPDX-FileCopyrightText: 2024 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8from unit import GPSV11Unit 9import time 10 11 12label0 = None 13title0 = None 14label1 = None 15label2 = None 16label3 = None 17label4 = None 18label5 = None 19label6 = None 20gpsv11_0 = None 21 22 23power_on_time = None 24 25 26def setup(): 27 global label0, title0, label1, label2, label3, label4, label5, label6, gpsv11_0, power_on_time 28 29 M5.begin() 30 Widgets.fillScreen(0x222222) 31 label0 = Widgets.Label("Power On:", 1, 33, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 32 title0 = Widgets.Title( 33 "GPSV11Unit Core2 Example", 3, 0xFFFFFF, 0x0000FF, Widgets.FONTS.DejaVu18 34 ) 35 label1 = Widgets.Label( 36 "Satellite Num:", 1, 66, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18 37 ) 38 label2 = Widgets.Label("Timestamp:", 1, 202, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 39 label3 = Widgets.Label("GPS Data:", -6, 526, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 40 label4 = Widgets.Label("Latitude:", 1, 104, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 41 label5 = Widgets.Label("Longitude:", 1, 140, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 42 label6 = Widgets.Label("Altitude:", 1, 170, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 43 44 gpsv11_0 = GPSV11Unit(2, port=(33, 32)) 45 gpsv11_0.set_work_mode(7) 46 power_on_time = time.time() 47 48 49def loop(): 50 global label0, title0, label1, label2, label3, label4, label5, label6, gpsv11_0, power_on_time 51 M5.update() 52 label0.setText(str((str("Power On:") + str(((time.time()) - power_on_time))))) 53 label1.setText(str((str("Satellite Num:") + str((gpsv11_0.get_satellite_num()))))) 54 label2.setText(str((str("Timestamp:") + str((gpsv11_0.get_timestamp()))))) 55 label4.setText(str((str("Latitude:") + str((gpsv11_0.get_latitude()))))) 56 label5.setText(str((str("Longitude:") + str((gpsv11_0.get_longitude()))))) 57 label6.setText(str((str("Altitude:") + str((gpsv11_0.get_altitude()))))) 58 time.sleep(1) 59 60 61if __name__ == "__main__": 62 try: 63 setup() 64 while True: 65 loop() 66 except (Exception, KeyboardInterrupt) as e: 67 try: 68 from utility import print_error_msg 69 70 print_error_msg(e) 71 except ImportError: 72 print("please update to latest firmware")
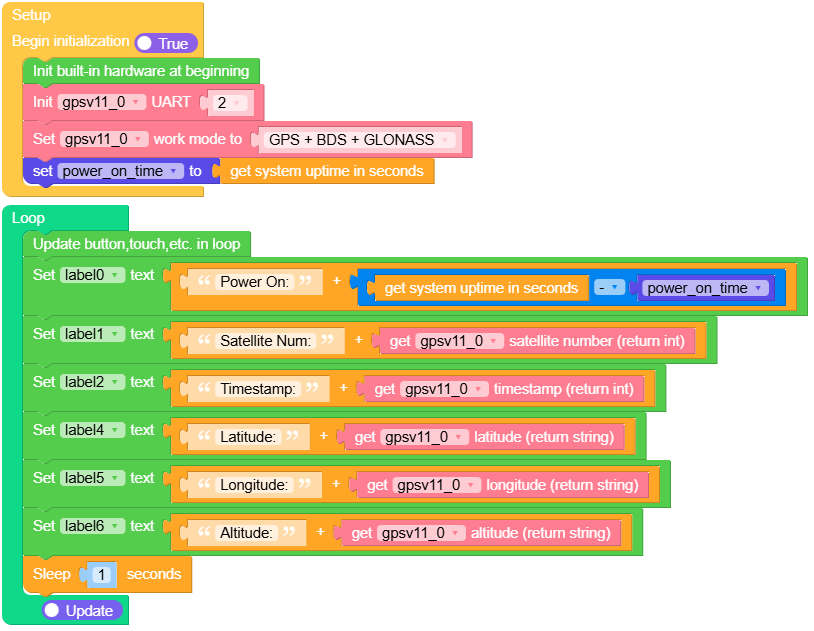
UiFlow2 应用示例
class GPSV11Unit
Constructors

Methods

- GPSV11Unit.get_work_mode()
获取 GPS 模块当前的工作模式。
- 返回:
GPS 模块的当前工作模式。
UiFlow2

- GPSV11Unit.get_antenna_state()
获取天线的状态。
- 返回:
天线状态。
UiFlow2

- GPSV11Unit.get_gps_time()
获取当前 GPS 时间。
- 返回:
GPS 时间,以字符串列表形式表示 [hour, minute, second]。
UiFlow2

- GPSV11Unit.get_gps_date()
获取当前 GPS 日期。
- 返回:
GPS 日期,以字符串列表形式表示:[day, month, year]。
UiFlow2

- GPSV11Unit.get_gps_date_time()
获取当前 GPS 合并后的日期和时间。
- 返回:
GPS 日期和时间,以字符串列表形式返回 [year, month, day, hour, minute, second]。
UiFlow2

- GPSV11Unit.get_timestamp()
获取当前 GPS 时间的时间戳。
- 返回:
表示当前 GPS 时间的时间戳。
UiFlow2

- GPSV11Unit.get_latitude()
获取当前纬度。
- 返回:
当前纬度的字符串格式。
UiFlow2

- GPSV11Unit.get_longitude()
获取当前经度。
- 返回:
当前以字符串格式表示的经度。
UiFlow2

- GPSV11Unit.get_altitude()
获取当前海拔。
- 返回:
当前海拔的字符串格式。
UiFlow2

- GPSV11Unit.get_satellite_num()
获取用于定位的卫星数量。
- 返回:
卫星数量。
UiFlow2

- GPSV11Unit.get_pos_quality()
获取 GPS 位置信息的质量。
- 返回:
位置质量指示器。
UiFlow2

- GPSV11Unit.get_corse_over_ground()
获取地面航向(COG)。
- 返回:
以度为单位的地面航向。
UiFlow2

- GPSV11Unit.get_speed_over_ground()
获取对地速度(SOG)。
- 返回:
对地速度,单位为节。
UiFlow2

- GPSV11Unit.set_time_zone(value)
为 GPS 时间设置时区偏移量。
- 参数:
value – 要设置的时区偏移值。
UiFlow2

- GPSV11Unit.get_time_zone()
获取当前时区偏移量。
- 返回:
当前时区偏移量。
UiFlow2

- GPSV11Unit.deinit()
反初始化 GPS 单元,停止所有正在运行的任务并释放资源。
UiFlow2
- GPSV11Unit._add_checksum(message)
为与 GPS 模块通信的消息添加校验和。
- 参数:
message (str) – 将添加校验和的消息。
- 返回:
带有校验和的消息。
- GPSV11Unit._monitor()
监控 GPS 数据并解码传入的语句。