LaserRX Unit
LASER.RX 是 M5Units 中的一种通信设备,即激光接收器。它主要由激光三极管构成。激光通信设备是通过大气进行的无线连接,其工作方式类似于光纤链路,不同之处在于光束是通过自由空间传输的。虽然发射器和接收器必须满足视距条件,但其优势在于无需广播许可,也不需要铺设地下电缆。激光通信系统易于部署,因为它们成本低、体积小、功耗低,并且不需要进行任何无线电干扰研究。需要两束平行光束,一束用于发射,一束用于接收。因此我们还配套提供了 LASER.TX。
支持以下产品:

LaserTX 示例:
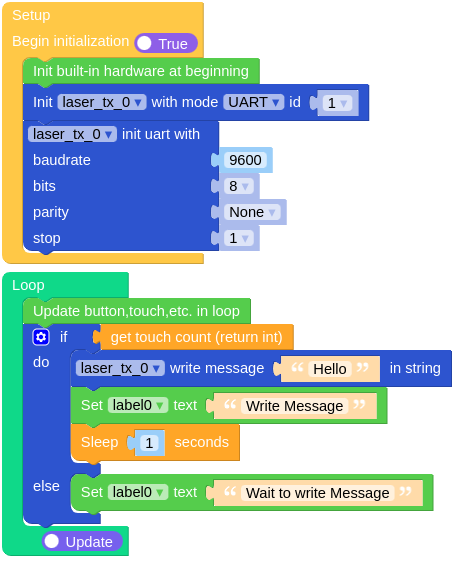
1# SPDX-FileCopyrightText: 2024 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8from unit import LaserTXUnit 9import time 10 11 12title1 = None 13label0 = None 14laser_tx_0 = None 15 16 17def setup(): 18 global title1, label0, laser_tx_0 19 20 M5.begin() 21 Widgets.fillScreen(0x222222) 22 title1 = Widgets.Title( 23 "LaserTXUnit CoreS3 Example", 3, 0xFFFFFF, 0x0000FF, Widgets.FONTS.DejaVu18 24 ) 25 label0 = Widgets.Label("label0", 2, 116, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 26 27 laser_tx_0 = LaserTXUnit((1, 2), mode=2, id=1) 28 laser_tx_0.init_uart(9600, 8, None, 1) 29 30 31def loop(): 32 global title1, label0, laser_tx_0 33 M5.update() 34 if M5.Touch.getCount(): 35 laser_tx_0.write("Hello") 36 label0.setText(str("Write Message")) 37 time.sleep(1) 38 else: 39 label0.setText(str("Wait to write Message")) 40 41 42if __name__ == "__main__": 43 try: 44 setup() 45 while True: 46 loop() 47 except (Exception, KeyboardInterrupt) as e: 48 try: 49 from utility import print_error_msg 50 51 print_error_msg(e) 52 except ImportError: 53 print("please update to latest firmware")
LaserRX 示例:
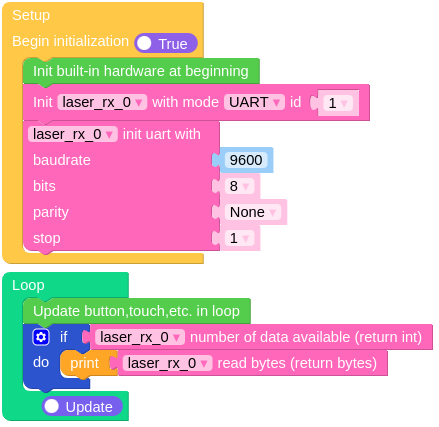
1# SPDX-FileCopyrightText: 2024 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8from unit import LaserRXUnit 9 10 11title0 = None 12laser_rx_0 = None 13 14 15def setup(): 16 global title0, laser_rx_0 17 18 M5.begin() 19 Widgets.fillScreen(0x222222) 20 title0 = Widgets.Title( 21 "LaserRXUnit Core2 Example", 3, 0xFFFFFF, 0x0000FF, Widgets.FONTS.DejaVu18 22 ) 23 24 laser_rx_0 = LaserRXUnit((33, 32), mode=2, id=1) 25 laser_rx_0.init_uart(9600, 8, None, 1) 26 27 28def loop(): 29 global title0, laser_rx_0 30 M5.update() 31 if laser_rx_0.any(): 32 print(laser_rx_0.read()) 33 34 35if __name__ == "__main__": 36 try: 37 setup() 38 while True: 39 loop() 40 except (Exception, KeyboardInterrupt) as e: 41 try: 42 from utility import print_error_msg 43 44 print_error_msg(e) 45 except ImportError: 46 print("please update to latest firmware")
LaserTX UiFlow2 应用示例:
LaserRX UiFlow2 应用示例:
class LaserRXUnit
Constructors

Methods
- LaserRXUnit.init_uart(baudrate, bits, parity, stop)
使用指定参数初始化 UART 通信。
- 参数:
UiFlow2

- LaserRXUnit.read(byte)
从 UART 读取数据。可选指定要读取的字节数。
- 参数:
byte – 要读取的字节数。如果为 None,则读取所有可用数据。
- 返回:
从 UART 读取到的数据;如果没有可用数据,则返回 None。
UiFlow2

- LaserRXUnit.readline()
从 UART 读取单行数据。
- 返回:
从 UART 读取的一行数据;如果没有可用数据,则返回 None。
- LaserRXUnit.any()
检查 UART 缓冲区中是否有可用数据。
- 返回:
如果数据可用则为 True;否则为 False。
UiFlow2

- LaserRXUnit.value()
在使用 PIN_MODE 时获取输入引脚的当前值。
- 返回:
引脚的值(0 或 1)。