Catch Unit
Catch 是一款以 SG92R 舵机作为动力源的夹爪。该舵机使用 PWM 信号驱动夹爪齿轮旋转,从而控制夹爪进行夹持和释放操作。其结构采用兼容 Lego 8 mm 圆孔的设计。你可以将其与其他 Lego 组件组合,搭建富有创意的控制结构,例如机械臂、夹爪小车等。
支持以下产品:

MicroPython 应用示例:
1# SPDX-FileCopyrightText: 2024 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8from unit import CatchUnit 9import time 10 11 12catch_0 = None 13 14 15import random 16 17 18def setup(): 19 global catch_0 20 21 M5.begin() 22 Widgets.fillScreen(0x222222) 23 24 catch_0 = CatchUnit((8, 9)) 25 26 27def loop(): 28 global catch_0 29 M5.update() 30 catch_0.set_clamp_percent(random.randint(1, 100)) 31 time.sleep_ms(100) 32 33 34if __name__ == "__main__": 35 try: 36 setup() 37 while True: 38 loop() 39 except (Exception, KeyboardInterrupt) as e: 40 try: 41 from utility import print_error_msg 42 43 print_error_msg(e) 44 except ImportError: 45 print("please update to latest firmware")
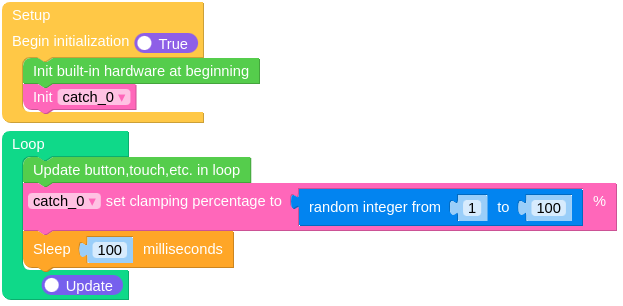
UiFlow2 应用示例