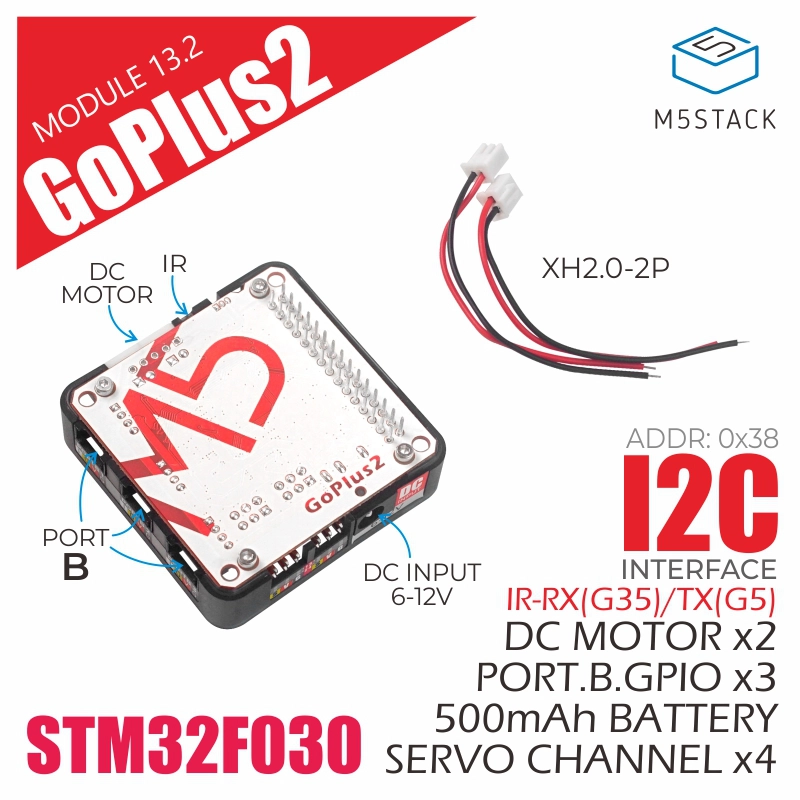
GoPlus2Module
Support the following products:
Micropython Example:
1# SPDX-FileCopyrightText: 2024 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8from module import GoPlus2Module 9import time 10 11 12title0 = None 13label0 = None 14label1 = None 15goplus20 = None 16 17 18def setup(): 19 global title0, label0, label1, goplus20 20 21 M5.begin() 22 Widgets.fillScreen(0x222222) 23 title0 = Widgets.Title("GoPlus2 Module Example", 3, 0xFFFFFF, 0x0000FF, Widgets.FONTS.DejaVu18) 24 label0 = Widgets.Label("Motor Speed:", 2, 72, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 25 label1 = Widgets.Label("Servo Angle:", 2, 116, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 26 27 goplus20 = GoPlus2Module(0x38) 28 goplus20.set_digital_output(1, 1) 29 goplus20.set_digital_output(2, 1) 30 goplus20.set_digital_output(3, 1) 31 32 33def loop(): 34 global title0, label0, label1, goplus20 35 M5.update() 36 label0.setText(str((str("Motor Speed:") + str("180")))) 37 label1.setText(str((str("Servo Angle:") + str("-127")))) 38 goplus20.set_servo_angle(1, 180) 39 goplus20.set_servo_angle(2, 180) 40 goplus20.set_servo_angle(3, 180) 41 goplus20.set_servo_angle(4, 180) 42 goplus20.set_motor_speed(1, -127) 43 goplus20.set_motor_speed(2, -127) 44 time.sleep(4) 45 label0.setText(str((str("Motor Speed:") + str("-180")))) 46 label1.setText(str((str("Servo Angle:") + str("127")))) 47 goplus20.set_servo_angle(1, 0) 48 goplus20.set_servo_angle(2, 0) 49 goplus20.set_servo_angle(3, 0) 50 goplus20.set_servo_angle(4, 127) 51 goplus20.set_motor_speed(1, 127) 52 time.sleep(4) 53 54 55if __name__ == "__main__": 56 try: 57 setup() 58 while True: 59 loop() 60 except (Exception, KeyboardInterrupt) as e: 61 try: 62 from utility import print_error_msg 63 64 print_error_msg(e) 65 except ImportError: 66 print("please update to latest firmware")
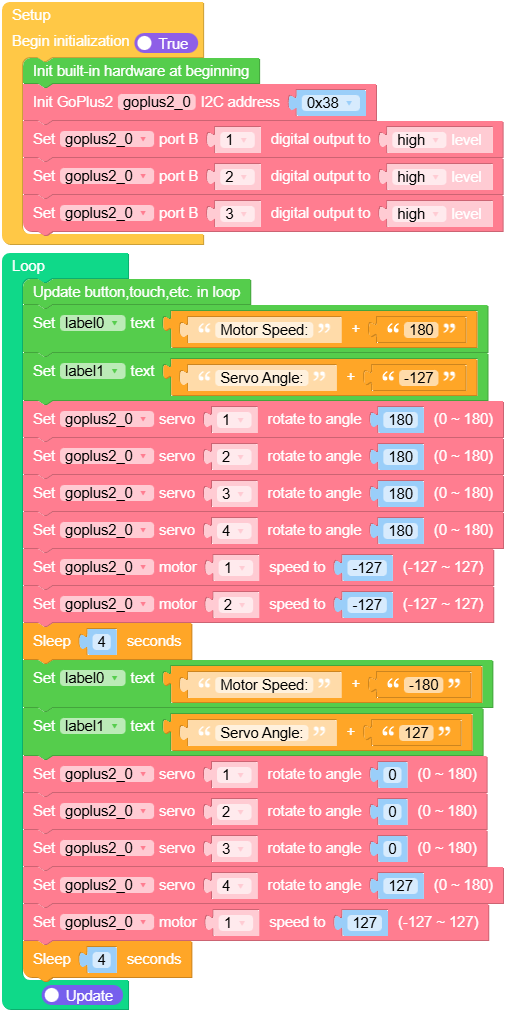
UIFLOW2 Example:
class GoPlus2Module
Constructors

Methods
- GoPlus2Module.set_servo_angle(servo_num, angle) None
Set the angle of the specified servo.
- Parameters:
UIFLOW2:

- GoPlus2Module.set_servo_pulse_width(servo_num, pulse_width) None
Set the pulse width for the specified servo.
- Parameters:
UIFLOW2:

- GoPlus2Module.set_motor_speed(motor_num, speed) None
Set the speed of the specified motor.
- Parameters:
UIFLOW2:

- GoPlus2Module.set_digital_output(pin_num, value) None
Set the digital output for the specified pin.
- Parameters:
UIFLOW2:


