Commu Module
This is the driver library for the module Commu for receiving and sending CAN / RS485 / I2C data.
Support the following products:

UiFlow2 Example
CAN, RS485, I2C communication
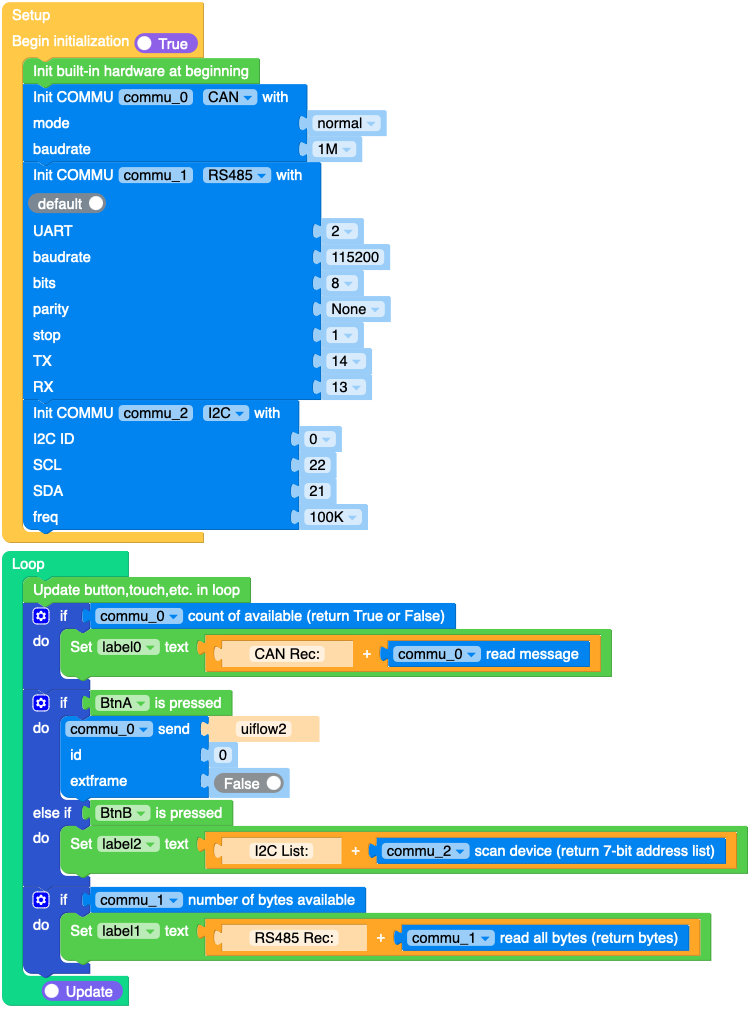
Open the commu_core2_example.m5f2 project in UiFlow2.
This example shows how to receive and send data using the Commu Module.
UiFlow2 Code Block:
Example output:
None
MicroPython Example
CAN, RS485, I2C communication
This example shows how to receive and send data using the Commu Module.
MicroPython Code Block:
1# SPDX-FileCopyrightText: 2025 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8from module import CommuModuleCAN 9from module import CommuModuleRS485 10from module import CommuModuleI2C 11from hardware import Pin 12 13 14title0 = None 15label0 = None 16label1 = None 17label2 = None 18commu_0 = None 19commu_1 = None 20commu_2 = None 21 22 23def setup(): 24 global title0, label0, label1, label2, commu_0, commu_1, commu_2 25 26 M5.begin() 27 Widgets.fillScreen(0x222222) 28 title0 = Widgets.Title( 29 "COMMUModule Core2 Example", 3, 0xFFFFFF, 0x0000FF, Widgets.FONTS.DejaVu18 30 ) 31 label0 = Widgets.Label("CAN Rec:", 1, 77, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 32 label1 = Widgets.Label("RS485 Rec:", 1, 121, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 33 label2 = Widgets.Label("I2C List:", 1, 166, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 34 35 commu_0 = CommuModuleCAN(0x00, baudrate=16) 36 commu_1 = CommuModuleRS485(2, baudrate=115200, bits=8, parity=None, stop=1, tx=14, rx=13) 37 commu_2 = CommuModuleI2C(0, scl=Pin(22), sda=Pin(21), freq=100000) 38 39 40def loop(): 41 global title0, label0, label1, label2, commu_0, commu_1, commu_2 42 M5.update() 43 if commu_0.any(): 44 label0.setText(str((str("CAN Rec:") + str((commu_0.recv()))))) 45 if BtnA.isPressed(): 46 commu_0.send("uiflow2", 0, extframe=False) 47 elif BtnB.isPressed(): 48 label2.setText(str((str("I2C List:") + str((commu_2.scan()))))) 49 if commu_1.any(): 50 label1.setText(str((str("RS485 Rec:") + str((commu_1.read()))))) 51 52 53if __name__ == "__main__": 54 try: 55 setup() 56 while True: 57 loop() 58 except (Exception, KeyboardInterrupt) as e: 59 try: 60 from utility import print_error_msg 61 62 print_error_msg(e) 63 except ImportError: 64 print("please update to latest firmware")
Example output:
None
API
CommuModule
- class module.commu.CommuModuleCAN(mode=0, baudrate=16, spi_baud=8000000, canIDMode=0, debug=False)
Bases:
MCP2515_CANCreate an CommuModuleCAN object
- Parameters:
mode (int) –
The CAN mode to use(NORMAL, LISTEN_ONLY), Default is NORMAL.
- Options:
NORMAL: Normal modeLISTEN_ONLY: Listen only mode
baudrate (int) –
The baudrate to use, Default is CAN_1000KBPS.
- Options:
CAN_5KBPS: 5KbpsCAN_10KBPS: 10KbpsCAN_20KBPS: 20KbpsCAN_31K25BPS: 31.25KbpsCAN_33KBPS: 33KbpsCAN_40KBPS: 40KbpsCAN_50KBPS: 50KbpsCAN_80KBPS: 80KbpsCAN_83K3BPS: 83.33KbpsCAN_95KBPS: 95KbpsCAN_100KBPS: 100KbpsCAN_125KBPS: 125KbpsCAN_200KBPS: 200KbpsCAN_250KBPS: 250KbpsCAN_500KBPS: 500KbpsCAN_1000KBPS: 1Mbps
spi_baud (int) – The SPI baudrate to use, Default is 8000000.
canIDMode (int) –
The CAN ID mode to use(MCP_STDEXT, MCP_EXTDONLY), Default is MCP_STDEXT.
- Options:
MCP_STDEXT: Standard and ExtendedMCP_EXTDONLY: Extended only
debug (bool) – Whether to enable debug mode, Default is False.
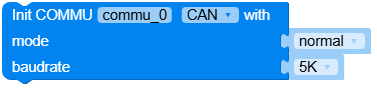
UiFlow2 Code Block:
MicroPython Code Block:
from module import CommuModuleCAN commu = CommuModuleCAN(CommuModule.NORMAL, baudrate=16)
- info()
Get the state of error information.
- Returns:
The current error information.
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
commu.info()
- any()
Check if any message is available.
- Returns:
The current message availability.
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
commu.any()
- recv(fifo=0, list=None, timeout=5000)
Read a message from the CAN bus.
- Parameters:
- Returns:
Tuple containing (can_id, is_extended, is_rtr, fmi, data)
- Return type:
tuple
The id of the message.
A boolean that indicates if the message ID is standard or extended.
A boolean that indicates if the message is an RTR message.
The FMI (Filter Match Index) value.
An array containing the data.
UiFlow2 Code Block:


MicroPython Code Block:
commu.recv(0) buf = bytearray(8) lst = [0, 0, 0, 0, memoryview(buf)] # No heap memory is allocated in the following call commu.recv(0, lst)
- send(data, can_id, extframe=False)
Send a message to the CAN bus.
- Parameters:
- Returns:
The message data.
- Return type:
UiFlow2 Code Block:
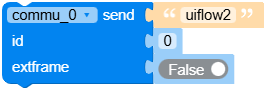
MicroPython Code Block:
commu.send('uiflow2', 0, extframe=False)
- class module.commu.CommuModuleRS485(id, **kwargs)
Bases:
objectThe CommuModuleRS485 class wraps an instance of the UART class.
For more details, see hardware.UART.
- class module.commu.CommuModuleI2C(id, **kwargs)
Bases:
objectThe CommuModuleI2C class wraps an instance of the I2C class.
For more details, see machine.I2C. – a two-wire serial protocol.