GNSS Module
GNSS Module is a global positioning wireless communication module featuring the NEO-M9N-00B GPS module. It incorporates BMI270, BMM150 and a barometric pressure sensor.
Support the following products:

Micropython Example:
1# SPDX-FileCopyrightText: 2024 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8from module import GNSSModule 9 10 11title0 = None 12label3 = None 13label4 = None 14label5 = None 15label6 = None 16label10 = None 17label11 = None 18label12 = None 19label13 = None 20label14 = None 21label15 = None 22label16 = None 23label17 = None 24label18 = None 25label19 = None 26label20 = None 27label21 = None 28label22 = None 29label23 = None 30line0 = None 31gnss_0 = None 32 33 34list2 = None 35 36 37def setup(): 38 global \ 39 title0, \ 40 label3, \ 41 label4, \ 42 label5, \ 43 label6, \ 44 label10, \ 45 label11, \ 46 label12, \ 47 label13, \ 48 label14, \ 49 label15, \ 50 label16, \ 51 label17, \ 52 label18, \ 53 label19, \ 54 label20, \ 55 label21, \ 56 label22, \ 57 label23, \ 58 line0, \ 59 gnss_0, \ 60 list2 61 62 M5.begin() 63 Widgets.fillScreen(0x222222) 64 title0 = Widgets.Title( 65 " M135 GNSS Demo", 3, 0xFFFFFF, 0x0000FF, Widgets.FONTS.DejaVu18 66 ) 67 label3 = Widgets.Label("angle:", 2, 23, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 68 label4 = Widgets.Label( 69 "attitude(yaw):", 1, 73, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18 70 ) 71 label5 = Widgets.Label("temp:", 4, 128, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 72 label6 = Widgets.Label("pressure:", 2, 180, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 73 label10 = Widgets.Label("label10", 4, 46, 1.0, 0x3EF815, 0x222222, Widgets.FONTS.DejaVu18) 74 label11 = Widgets.Label("label11", 5, 102, 1.0, 0xF60505, 0x222222, Widgets.FONTS.DejaVu18) 75 label12 = Widgets.Label("label12", 5, 154, 1.0, 0x3EF815, 0x222222, Widgets.FONTS.DejaVu18) 76 label13 = Widgets.Label("label13", 5, 208, 1.0, 0xF60505, 0x222222, Widgets.FONTS.DejaVu18) 77 label14 = Widgets.Label("lat:", 158, 51, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 78 label15 = Widgets.Label("long:", 157, 80, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 79 label16 = Widgets.Label("sta:", 158, 24, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 80 label17 = Widgets.Label("date:", 158, 108, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 81 label18 = Widgets.Label("time:", 159, 168, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 82 label19 = Widgets.Label("label19", 159, 138, 1.0, 0x15F0FF, 0x222222, Widgets.FONTS.DejaVu18) 83 label20 = Widgets.Label("label20", 159, 197, 1.0, 0xEAFF00, 0x222222, Widgets.FONTS.DejaVu18) 84 label21 = Widgets.Label("label21", 205, 25, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 85 label22 = Widgets.Label("label22", 205, 52, 1.0, 0x15F0FF, 0x222222, Widgets.FONTS.DejaVu18) 86 label23 = Widgets.Label("label23", 205, 81, 1.0, 0xEAFF00, 0x222222, Widgets.FONTS.DejaVu18) 87 line0 = Widgets.Line(142, 27, 142, 232, 0xFFFFFF) 88 89 gnss_0 = GNSSModule(2, 13, 14, 0x69) 90 91 92def loop(): 93 global \ 94 title0, \ 95 label3, \ 96 label4, \ 97 label5, \ 98 label6, \ 99 label10, \ 100 label11, \ 101 label12, \ 102 label13, \ 103 label14, \ 104 label15, \ 105 label16, \ 106 label17, \ 107 label18, \ 108 label19, \ 109 label20, \ 110 label21, \ 111 label22, \ 112 label23, \ 113 line0, \ 114 gnss_0, \ 115 list2 116 M5.update() 117 label10.setText(str(gnss_0.get_compass())) 118 label11.setText(str((gnss_0.get_attitude())[0])) 119 label12.setText(str(gnss_0.get_temperature())) 120 label13.setText(str(gnss_0.get_pressure())) 121 if gnss_0.is_locate_valid(): 122 label21.setText(str("OK")) 123 else: 124 label21.setText(str("Failed")) 125 label22.setText(str(gnss_0.get_latitude())) 126 label23.setText(str(gnss_0.get_longitude())) 127 label19.setText(str(gnss_0.get_date())) 128 label20.setText(str(gnss_0.get_time())) 129 130 131if __name__ == "__main__": 132 try: 133 setup() 134 while True: 135 loop() 136 except (Exception, KeyboardInterrupt) as e: 137 try: 138 from utility import print_error_msg 139 140 print_error_msg(e) 141 except ImportError: 142 print("please update to latest firmware")
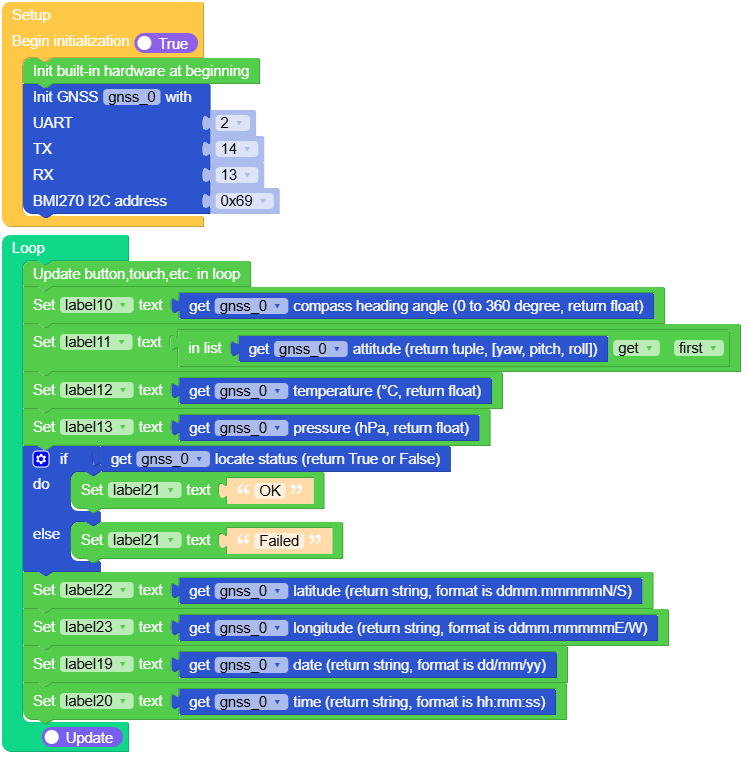
UIFLOW2 Example:
class GNSSModule
Constructors
Methods
- GNSSModule.set_accel_gyro_odr(accel_odr, gyro_odr)
Set the accelerometer and gyroscope output data rate.
- Parameters:
accel_odr – range of 0.78 Hz … 1.6 kHz. Options: -
25: 25 -50: 50 -100: 100 -200: 200 -400: 400 -800: 800 -1600: 1600 -0.78: 0.78 -1.5: 1.5 -3.1: 3.1 -6.25: 6.25 -12.5: 12.5gyro_odr – range of 25 Hz … 6.4 kHz. Options: -
25: 25 -50: 50 -100: 100 -200: 200 -400: 400 -800: 800 -1600: 1600 -3200: 3200
UIFLOW2:

- GNSSModule.set_accel_range(accel_scale)
Set the accelerometer scale range.
- Parameters:
accel_scale – scale range of ±2g, ±4g, ±8g and ±16g. Options: -
2: 2 -4: 4 -8: 8 -16: 16
UIFLOW2:

- GNSSModule.set_gyro_range(gyro_scale)
Set the gyroscope scale range.
- Parameters:
gyro_scale – Options: -
125: 125 -250: 250 -500: 500 -1000: 1000 -2000: 2000
UIFLOW2:

- GNSSModule.set_magnet_odr(magnet_odr)
- Parameters:
magnet_odr – Options: -
2: 2 -6: 6 -8: 8 -10: 10 -15: 15 -20: 20 -25: 25 -30: 30
UIFLOW2:

- GNSSModule.set_gyro_offsets(x, y, z)
Set the manual gyro calibrations offsets value.
- Parameters:
x – gyro calibrations offsets value of X-axis
y – gyro calibrations offsets value of Y-axis
z – gyro calibrations offsets value of Z-axis
UIFLOW2:

- GNSSModule.get_gyroscope()
Get the tuple of x, y, and z values of the gyroscope and gyroscope vector in rad/sec.
- Return (tuple):
gyroscope tuple (float, float, float)
UIFLOW2:

- GNSSModule.get_accelerometer()
Get the tuple of x, y, and z values of the accelerometer and acceleration vector in gravity units (9.81m/s^2).
- Return (tuple):
accelerometer tuple (float, float, float)
UIFLOW2:

- GNSSModule.get_magnetometer()
Get the tuple of x, y, and z values of the magnetometer and magnetometer vector in uT.
- Return (tuple):
magnetometer tuple (float, float, float)
UIFLOW2:

- GNSSModule.get_compass()
Get the compass heading value is in range of 0º ~ 360º.
- Return (float):
range is 0 to 360 degree
UIFLOW2:

- GNSSModule.get_attitude()
Get the attitude angles as yaw, pitch, and roll in degrees.
- Return (tuple):
tuple of yaw, pitch, and roll (float, float, float)
UIFLOW2:

- GNSSModule.get_temperature()
Get the temperature value in degrees celsius from the BMP280 sensor.
- Return (float):
range is -40 ~ +85 °C.
UIFLOW2:

- GNSSModule.get_pressure()
Get the pressure value in pascals from the BMP280 sensor.
- Return (float):
range is 300 ~ 1100 hPa.
UIFLOW2:

- GNSSModule.set_time_zone(value)
set timezone function.
- Parameters:
value (int) – timezone value
UIFLOW2:

- GNSSModule.get_time_zone()
get timezone function.
- Return (int):
timezone value
UIFLOW2:

- GNSSModule.get_satellite_num()
get satellite numbers.
- Return (str):
satellite numbers value.
UIFLOW2:

- GNSSModule.get_altitude()
get altitude.
- Return (str):
altitude unit is meter.
UIFLOW2:

- GNSSModule.get_time()
get time.
- Return (str):
time(hh:mm:ss)
UIFLOW2:

- GNSSModule.get_date()
get date.
- Return (str):
date(dd/mm/yy)
UIFLOW2:

- GNSSModule.get_latitude()
get latitude.
- Return (str):
latitude, using degrees minutes format (ddmm.mmmmmN/S).
UIFLOW2:

- GNSSModule.get_longitude()
get longitude.
- Return (str):
longitude, using degrees minutes format (ddmm.mmmmmE/W).
UIFLOW2:

- GNSSModule.get_latitude_decimal()
get latitude decimal.
- Return (float):
latitude decimal(dd.dddd).
UIFLOW2:

- GNSSModule.get_longitude_decimal()
get longitude decimal.
- Return (float):
longitude decimal(dd.dddd).
UIFLOW2:

- GNSSModule.get_speed(type)
get speed.
- Return (str):
speed.
- Parameters:
type (int) – speed type, 0 km/h, 1 knot/h Options: -
km/h: 0 -knot/h: 1
UIFLOW2:

- GNSSModule.get_course()
get course.
- Return (str):
course unit is °.
UIFLOW2:

- GNSSModule.is_locate_valid()
get locate status.
- Return (bool):
locate status, true is locate, false is not locate.
UIFLOW2:
