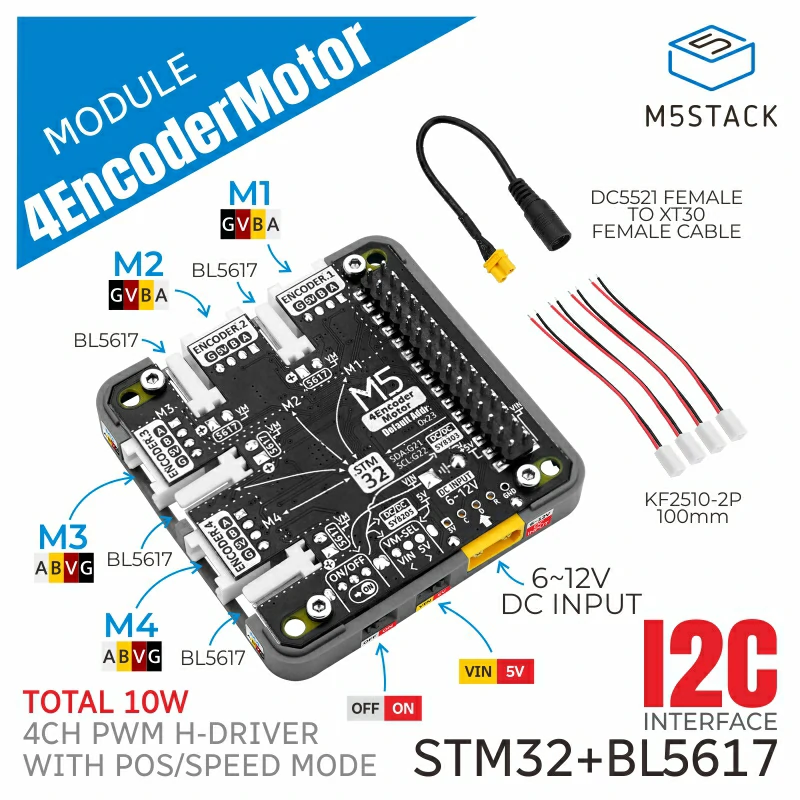
4EncoderMotor Module
4EncoderMotor Module is a 4-channel encoder motor driver module that utilizes the STM32+BL5617 solution. It is suitable for various applications such as robot motion control, automation equipment, smart vehicles, laboratory equipment, and industrial automation systems.
This is the driver library for the 4EncoderMotor Module, use to control motor and read encoder value.
Support the following products:

UiFlow2 Example
Motor control
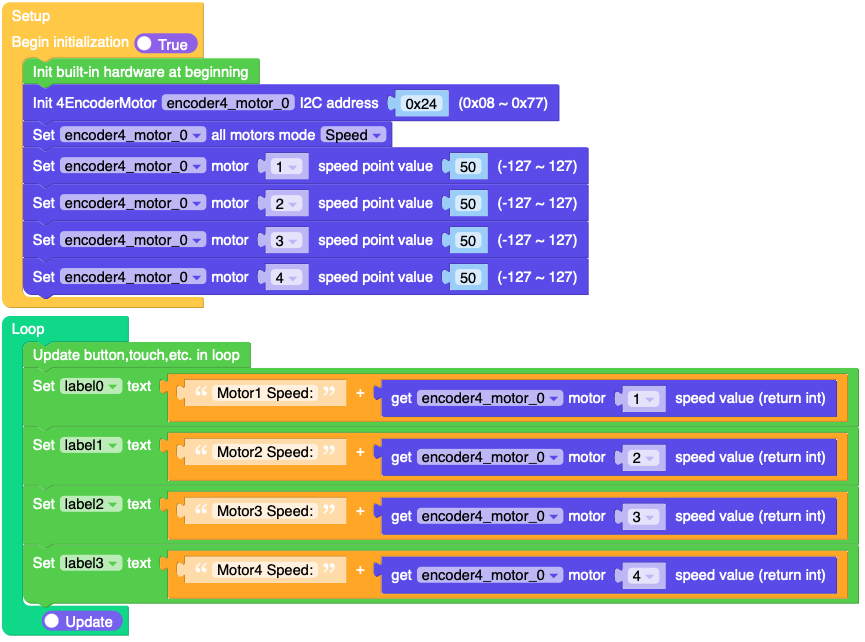
Open the encoder4motor_core2_example.m5f2 project in UiFlow2.
This example shows how to control the motor and read the encoder value.
UiFlow2 Code Block:
Example output:
None
MicroPython Example
Motor control
This example shows how to control the motor and read the encoder value.
MicroPython Code Block:
1# SPDX-FileCopyrightText: 2024 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8from module import Encoder4MotorModule 9 10 11title0 = None 12label0 = None 13label1 = None 14label2 = None 15label3 = None 16encoder4_motor_0 = None 17 18 19def setup(): 20 global title0, label0, label1, label2, label3, encoder4_motor_0 21 22 M5.begin() 23 Widgets.fillScreen(0x222222) 24 title0 = Widgets.Title( 25 "4EncoderMotor Core2 Example", 3, 0xFFFFFF, 0x0000FF, Widgets.FONTS.DejaVu18 26 ) 27 label0 = Widgets.Label("label0", 1, 56, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 28 label1 = Widgets.Label("label1", 1, 100, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 29 label2 = Widgets.Label("label2", 1, 144, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 30 label3 = Widgets.Label("label3", 1, 185, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 31 32 encoder4_motor_0 = Encoder4MotorModule(address=0x24) 33 encoder4_motor_0.set_all_motors_mode(0x02) 34 encoder4_motor_0.set_speed_point_value(0x00, 50) 35 encoder4_motor_0.set_speed_point_value(0x01, 50) 36 encoder4_motor_0.set_speed_point_value(0x02, 50) 37 encoder4_motor_0.set_speed_point_value(0x03, 50) 38 39 40def loop(): 41 global title0, label0, label1, label2, label3, encoder4_motor_0 42 M5.update() 43 label0.setText( 44 str((str("Motor1 Speed:") + str((encoder4_motor_0.get_motor_speed_value(0x00))))) 45 ) 46 label1.setText( 47 str((str("Motor2 Speed:") + str((encoder4_motor_0.get_motor_speed_value(0x01))))) 48 ) 49 label2.setText( 50 str((str("Motor3 Speed:") + str((encoder4_motor_0.get_motor_speed_value(0x02))))) 51 ) 52 label3.setText( 53 str((str("Motor4 Speed:") + str((encoder4_motor_0.get_motor_speed_value(0x03))))) 54 ) 55 56 57if __name__ == "__main__": 58 try: 59 setup() 60 while True: 61 loop() 62 except (Exception, KeyboardInterrupt) as e: 63 try: 64 from utility import print_error_msg 65 66 print_error_msg(e) 67 except ImportError: 68 print("please update to latest firmware")
Example output:
None
API
Encoder4MotorModule
- class module.encoder4_motor.Encoder4MotorModule(address=36)
Bases:
objectCreate an Encoder4MotorModule object
- Parameters:
address (int) – The I2C address of the device. Default is 0x24.
UiFlow2 Code Block:

MicroPython Code Block:
from module import Encoder4MotorModule encoder4_motor = Encoder4MotorModule(0x24)
- set_motor_mode(motor, mode)
Set the motor mode.
- Parameters:
UiFlow2 Code Block:

MicroPython Code Block:
encoder4_motor.set_motor_mode(0, encoder4_motor.NORMAL_MODE)
- set_all_motors_mode(mode)
Set the mode of all motors.
- Parameters:
mode (int) –
The mode of the motors.
- Options:
NORMAL_MODE: 0POSITION_MODE: 1SPEED_MODE: 2
UiFlow2 Code Block:

MicroPython Code Block:
encoder4_motor.set_all_motors_mode(encoder4_motor.NORMAL_MODE)
- set_motor_pwm_dutycycle(motor, duty)
Set the PWM duty cycle of a motor.
UiFlow2 Code Block:

MicroPython Code Block:
encoder4_motor.set_motor_pwm_dutycycle(0, 127)
- get_motor_encoder_value(pos)
Get the encoder value of a motor.
- Parameters:
pos (int) – The motor to get the encoder value.
- Returns:
The encoder value.
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
encoder4_motor.get_motor_encoder_value(0)
- set_motor_encoder_value(pos, value)
Set the encoder value of a motor.
UiFlow2 Code Block:

MicroPython Code Block:
encoder4_motor.set_motor_encoder_value(0, 100)
- get_encoder_mode()
Get the encoder mode.
- Returns:
The encoder mode.
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
encoder4_motor.get_encoder_mode()
- set_encoder_mode(mode)
Set the encoder mode.
- Parameters:
mode (int) –
The mode of the encoder.
- Options:
AB: 0BA: 1
UiFlow2 Code Block:

MicroPython Code Block:
encoder4_motor.set_encoder_mode(0x00)
- get_motor_speed_value(pos)
Get the speed value of a motor.
- Parameters:
pos (int) – The motor to get the speed value.
- Returns:
The speed value.
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
encoder4_motor.get_motor_speed_value(0)
- set_position_encoder_value(pos, value)
Set the position encoder value of a motor.
- Parameters:
UiFlow2 Code Block:

MicroPython Code Block:
encoder4_motor.set_position_encoder_value(0, 100)
- set_position_max_speed_value(pos, value)
Set the maximum speed value of a motor.
- Parameters:
UiFlow2 Code Block:

MicroPython Code Block:
encoder4_motor.set_position_max_speed_value(0, 127)
- get_position_pid_value(pos)
Get the position PID value of a motor.
- Parameters:
pos (int) – The motor to get the position P,I,D value.
- Returns:
The position PID value.
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
encoder4_motor.get_position_pid_value(0)
- set_position_pid_value(pos, p, i, d)
Set the position P,I,D value of a motor.
- Parameters:
UiFlow2 Code Block:

MicroPython Code Block:
encoder4_motor.set_position_pid_value(0, 100, 100, 100)
- get_speed_pid_value(pos)
Get the speed PID value of a motor.
- Parameters:
pos (int) – The motor to get the speed P,I,D value.
- Returns:
The speed P,I,D value.
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
encoder4_motor.get_speed_PID_value(0)
- set_speed_pid_value(pos, p, i, d)
Set the speed PID value of a motor.
- Parameters:
UiFlow2 Code Block:

MicroPython Code Block:
encoder4_motor.set_speed_PID_value(0, 100, 100, 100)
- set_speed_point_value(pos, point)
Set the speed point value of a motor.
- Parameters:
UiFlow2 Code Block:

MicroPython Code Block:
encoder4_motor.set_speed_point_value(0, 127)
- get_vin_current_float_value()
Get the input current value in float.
- Returns:
The input current value.
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
encoder4_motor.get_vin_current_float_value()
- get_vin_current_int_value()
Get the input current value in int.
- Returns:
The input current value.
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
encoder4_motor.get_vin_current_int_value()
- get_vin_adc_raw8_value()
Get the input voltage ADC raw value in 8-bit.
- Returns:
The input voltage ADC raw value.
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
encoder4_motor.get_vin_adc_raw8_value()
- get_vin_adc_raw12_value()
Get the input voltage ADC raw value in 12-bit.
- Returns:
The input voltage ADC raw value.
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
encoder4_motor.get_vin_adc_raw12_value()
- get_vin_voltage()
Get the input voltage value.
- Returns:
The input voltage value.
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
encoder4_motor.get_vin_voltage()
- get_device_spec(info)
Get the device specification.
- Parameters:
info (int) – The information to get.
- Returns:
The device specification(firmware version/I2C address).
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
encoder4_motor.get_device_spec(0xFE)
- get_soft_start_state(motor)
Get the soft start state of a motor.
- Parameters:
motor (int) – The motor to get the soft start state.
- Returns:
The soft start state.
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
encoder4_motor.get_soft_start_state(0)
- set_soft_start_state(motor, state)
Set the soft start state of a motor.
- Parameters:
UiFlow2 Code Block:

MicroPython Code Block:
encoder4_motor.set_soft_start_state(0, True)
