CAN
CAN currently only supports the classic CAN controller on ESP32 series. At the physical level CAN bus consists of 2 lines: RX and TX. Note that to connect the M5Stack device to a CAN bus you must use a CAN transceiver to convert the CAN logic signals from the MCU to the correct voltage levels on the bus.
For detailed examples, please refer to: unit.CANUnit
API
CAN
- class hardware.CAN(bus, mode, tx, rx, prescaler=32, sjw=3, bs1=15, bs2=4, triple_sampling=False)
Construct a CAN object on the given bus.
- Parameters:
bus (int) – must be 0.
mode (int) – One of NORMAL, NO_ACKNOWLEDGE, LISTEN_ONLY.
tx (int) – The pin to use for transmitting data.
rx (int) – The pin to use for receiving data.
prescaler (int) – The value by which the CAN input clock is divided to generate the nominal bit time quanta. Value between 1 and 1024 inclusive for classic CAN.
sjw (int) – The resynchronisation jump width in units of time quanta for nominal bits; value between 1 and 4 inclusive for classic CAN.
bs1 (int) – Defines the location of the sample point in units of the time quanta for nominal bits; value between 1 and 16 inclusive for classic CAN.
bs2 (int) – Defines the location of the transmit point in units of the time quanta for nominal bits; value between 1 and 8 inclusive for classic CAN.
triple_sampling (bool) – Enables triple sampling when the TWAI controller samples a bit.
UiFlow2 Code Block:
MicroPython Code Block:
from hardware import CAN can = CAN(0, CAN.NORMAL, 0, 0, 25000)
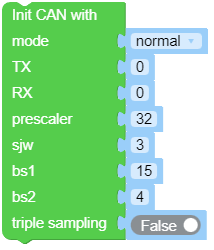
- init(mode, tx, rx, prescaler=32, sjw=3, bs1=15, bs2=4, triple_sampling=False)
Initialise the CAN bus with the given parameters.
- Parameters:
mode (int) – One of NORMAL, NO_ACKNOWLEDGE, LISTEN_ONLY.
tx (int) – The pin to use for transmitting data.
rx (int) – The pin to use for receiving data.
prescaler (int) – The value by which the CAN input clock is divided to generate the nominal bit time quanta.
sjw (int) – The resynchronisation jump width in units of time quanta for nominal bits.
bs1 (int) – Defines the location of the sample point in units of the time quanta for nominal bits.
bs2 (int) – Defines the location of the transmit point in units of the time quanta for nominal bits.
triple_sampling (bool) – Enables triple sampling when the TWAI controller samples a bit.
The time quanta tq is the basic unit of time for the CAN bus. tq is the CAN prescaler value divided by APB_CLK clock source (typically 80 MHz);
A single bit is made up of the synchronisation segment, which is always 1 tq. Then follows bit segment 1, then bit segment 2. The sample point is after bit segment 1 finishes. The transmit point is after bit segment 2 finishes. The baud rate will be 1/bittime, where the bittime is 1 + BS1 + BS2 multiplied by the time quanta tq.
For example, with APB_CLK=80MHz, prescaler=32, sjw=3, bs1=15, bs2=4, the value of tq is 0.4 microseconds. The bittime is 8 microseconds, and the baudrate is 125kHz.
See esp32 technical reference manual for more details.
MicroPython Code Block:
can.init(CAN.NORMAL, 0, 0, 25000)
- deinit()
Turn off the CAN bus.
UiFlow2 Code Block:

MicroPython Code Block:
can.deinit()
- restart()
Force a software restart of the CAN controller without resetting its configuration.
If the controller enters the bus-off state then it will no longer participate in bus activity. If the controller is not configured to automatically restart (see :meth:`~CAN.init()`) then this method can be used to trigger a restart, and the controller will follow the CAN protocol to leave the bus-off state and go into the error active state.
UiFlow2 Code Block:

MicroPython Code Block:
can.restart()
- state()
Return the state of the controller.
- Returns:
int
``0`` – ``CAN.STOPPED`` : the controller is completely off and reset;
``4`` – ``CAN.BUS_OFF`` : the controller is on but not participating in bus activity (TEC overflowed beyond 255);
``5`` – ``CAN.RECOVERING`` – The controller is undergoing bus recovery.
``6`` – ``CAN.RUNNING`` : The controller can transmit and receive messages;
UiFlow2 Code Block:

MicroPython Code Block:
status = can.state()
- info([list])
Get information about the controller’s error states and TX and RX buffers.
- Parameters:
list (list) – Optional list object with at least 8 entries.
- Returns:
list
The values in the list are:
TEC value
REC value
number of times the controller enterted the Error Warning state(ignored for now, compatible with pyb.CAN)
number of times the controller enterted the Error Passive state(ignored for now, compatible with pyb.CAN)
number of times the controller enterted the Bus Off state(ignored for now, compatible with pyb.CAN)
number of pending TX messages
number of pending RX messages
number of pending RX messages on fifo 1(ignored for now, compatible with pyb.CAN)
UiFlow2 Code Block:

MicroPython Code Block:
info = can.info()
- any(fifo)
Return ``True`` if any message waiting on the FIFO, else ``False``.
- Parameters:
fifo (int) – FIFO index.
- Returns:
bool
UiFlow2 Code Block:

MicroPython Code Block:
if can.any(0): print("Message waiting")
- recv(fifo, list=None, *, timeout=5000)
Receive data on the bus.
- Parameters:
- Returns:
tuple
Return value: A tuple containing five values.
The id of the message.
A boolean that indicates if the message ID is standard or extended.
A boolean that indicates if the message is an RTR message.
The FMI (Filter Match Index) value.
An array containing the data.
If list is ``None`` then a new tuple will be allocated, as well as a new bytes object to contain the data (as the fifth element in the tuple).
If list is not ``None`` then it should be a list object with a least five elements. The fifth element should be a memoryview object which is created from either a bytearray or an array of type ‘B’ or ‘b’, and this array must have enough room for at least 8 bytes. The list object will then be populated with the first four return values above, and the memoryview object will be resized inplace to the size of the data and filled in with that data. The same list and memoryview objects can be reused in subsequent calls to this method, providing a way of receiving data without using the heap. For example:
buf = bytearray(8) lst = [0, 0, 0, 0, memoryview(buf)] # No heap memory is allocated in the following call can.recv(0, lst)
UiFlow2 Code Block:


MicroPython Code Block:
can.recv(0)
- send(data, id, *, timeout=0, rtr=False, extframe=False)
Send a message on the bus.
- Parameters:
data – data is the data to send (an integer to send, or a buffer object).
id (int) – id is the id of the message to be sent.
timeout (int) – timeout is the timeout in milliseconds to wait for the send.
rtr (bool) – rtr is a boolean that specifies if the message shall be sent as a remote transmission request. If rtr is True then only the length of data is used to fill in the DLC slot of the frame; the actual bytes in data are unused.
extframe (bool) – extframe if True the frame will have an extended identifier (29 bits), otherwise a standard identifier (11 bits) is used.
If timeout is 0 the message is placed in a buffer in one of three hardware buffers and the method returns immediately. If all three buffers are in use an exception is thrown. If timeout is not 0, the method waits until the message is transmitted. If the message can’t be transmitted within the specified time an exception is thrown.
- Returns:
None
UiFlow2 Code Block:

MicroPython Code Block:
can.send('message!', 123)