IMU
IMU is used to control the built-in accelerometer and gyroscope inside the host device. Below is the detailed IMU support for the host:
MPU6886 |
BMI270 |
BMM150 |
|
|---|---|---|---|
AtomS3 |
✔ |
||
AtomS3 Lite |
|||
AtomS3U |
|||
StampS3 |
|||
CoreS3 |
✔ |
✔ |
|
Core2 |
✔ |
||
TOUGH |
|||
StickC Plus |
✔ |
||
StickC Plus2 |
✔ |
Micropython Example:
1# SPDX-FileCopyrightText: 2024 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8 9 10title0 = None 11label2 = None 12label0 = None 13label3 = None 14label1 = None 15label4 = None 16label5 = None 17 18 19def setup(): 20 global title0, label2, label0, label3, label1, label4, label5 21 22 M5.begin() 23 Widgets.fillScreen(0x222222) 24 title0 = Widgets.Title("IMU CoreS3 example", 3, 0xFFFFFF, 0x0000FF, Widgets.FONTS.DejaVu18) 25 label2 = Widgets.Label("Acc_z:", 1, 98, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 26 label0 = Widgets.Label("Acc_x:", 1, 32, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 27 label3 = Widgets.Label("Gyro_x:", 1, 135, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 28 label1 = Widgets.Label("Acc_y:", 1, 66, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 29 label4 = Widgets.Label("Gyro_y:", 1, 168, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 30 label5 = Widgets.Label("Gyro_z:", 1, 198, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 31 32 33def loop(): 34 global title0, label2, label0, label3, label1, label4, label5 35 M5.update() 36 label0.setText(str((str("Acc_x:") + str(((Imu.getAccel())[0]))))) 37 label1.setText(str((str("Acc_y:") + str(((Imu.getAccel())[1]))))) 38 label2.setText(str((str("Acc_z:") + str(((Imu.getAccel())[2]))))) 39 label3.setText(str((str("Gyro_x:") + str(((Imu.getGyro())[0]))))) 40 label4.setText(str((str("Gyro_y:") + str(((Imu.getGyro())[1]))))) 41 label5.setText(str((str("Gyro_z:") + str(((Imu.getGyro())[2]))))) 42 43 44if __name__ == "__main__": 45 try: 46 setup() 47 while True: 48 loop() 49 except (Exception, KeyboardInterrupt) as e: 50 try: 51 from utility import print_error_msg 52 53 print_error_msg(e) 54 except ImportError: 55 print("please update to latest firmware")
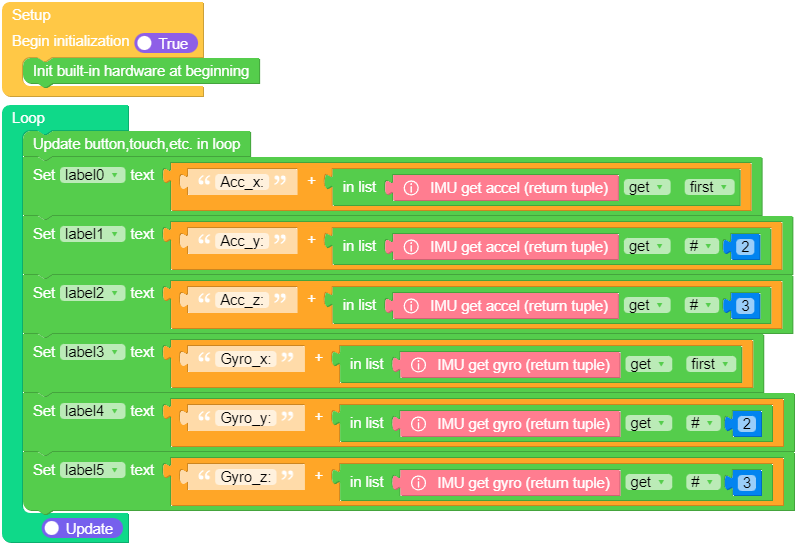
UIFLOW2 Example:
class IMU
Important
Methods of the IMU Class heavily rely on M5.begin()  and
and M5.update()  .
.
All calls to methods of IMU objects should be placed after M5.begin() , and M5.update() should be called in the main loop.
Methods
- IMU.getAccel() tuple[float, float, float]
Get the tuple of x, y, and z values of the accelerometer.
UIFLOW2:








