Atomic GPS Base v2.0
This is the driver library for the Atomic GPS Base v2.0, which is used to get the GPS data.
Support the following products:

UiFlow2 Example
get GPS data
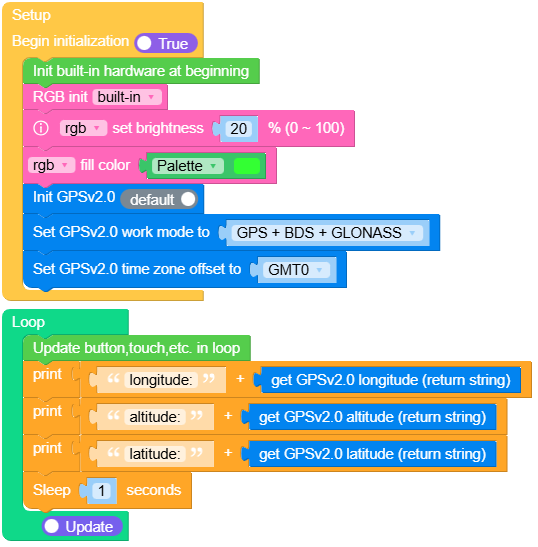
Open the base_gpsv2_atom_example.m5f2 project in UiFlow2.
This example demonstrates how to get the GPS data using Atomic GPS Base v2.0.
UiFlow2 Code Block:
Example output:
None
MicroPython Example
get GPS data
This example demonstrates how to get the GPS data using Atomic GPS Base v2.0.
MicroPython Code Block:
1# SPDX-FileCopyrightText: 2025 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8from hardware import RGB 9from base import AtomicGPSV2Base 10import time 11 12 13rgb = None 14base_gpsv2 = None 15 16 17def setup(): 18 global rgb, base_gpsv2 19 20 M5.begin() 21 rgb = RGB() 22 rgb.set_screen([0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0]) 23 rgb.set_brightness(20) 24 rgb.fill_color(0x33FF33) 25 base_gpsv2 = AtomicGPSV2Base(2, port=(22, 19)) 26 base_gpsv2.set_work_mode(7) 27 base_gpsv2.set_time_zone(0) 28 29 30def loop(): 31 global rgb, base_gpsv2 32 M5.update() 33 print((str("longitude:") + str((base_gpsv2.get_longitude())))) 34 print((str("altitude:") + str((base_gpsv2.get_altitude())))) 35 print((str("latitude:") + str((base_gpsv2.get_latitude())))) 36 time.sleep(1) 37 38 39if __name__ == "__main__": 40 try: 41 setup() 42 while True: 43 loop() 44 except (Exception, KeyboardInterrupt) as e: 45 try: 46 from utility import print_error_msg 47 48 print_error_msg(e) 49 except ImportError: 50 print("please update to latest firmware")
Example output:
None
API
AtomicGPSV2Base
- class base.gpsv2.AtomicGPSV2Base(id=1, port=None, verbose=False)
Bases:
ATGM336HCreate an AtomicGPSV2Base object.
- Parameters:
UIFlow Code Block:
MicroPython Code Block:
from base.gpsv2 import AtomicGPSV2Base gps_0 = AtomicGPSV2Base(id=1, tx=5, rx=6)
- class driver.atgm336h.ATGM336H(id, tx, rx, pps=None, rst=None, verbose=False)
Bases:
objectCreate an ATGM336H object.
- Parameters:
id (int) – The UART ID for communication with the GPS module. It can be 1, or 2.
tx (int) – The TX pin is the pin that sends data to the GPS module.
rx (int) – The RX pin is the pin that receives data from the GPS module.
pps (int) – The PPS pin is the pin that receives the PPS signal from the GPS module.
verbose (bool) – Whether to print verbose output.
MicroPython Code Block:
from driver.atgm336h import ATGM336H gps_0 = ATGM336H(id=2, tx=5, rx=6)
- set_work_mode(mode)
Set the working mode of the GPS module.
- Parameters:
mode (int) – The mode to set, defined by the GPS module.
UiFlow2 Code Block:

MicroPython Code Block:
gps_0.set_work_mode(7)
- get_work_mode()
Get the current working mode of the GPS module.
- Returns:
The current working mode of the GPS module.
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
gps_0.get_work_mode()
- get_antenna_state()
Get the state of the antenna.
- Returns:
The antenna state.
- Return type:
MicroPython Code Block:
gps_0.get_antenna_state()
- get_gps_time()
Get the current GPS time.
UiFlow2 Code Block:

MicroPython Code Block:
gps_0.get_gps_time()
- get_gps_date()
Get the current GPS date.
UiFlow2 Code Block:

MicroPython Code Block:
gps_0.get_gps_date()
- get_gps_date_time()
Get the current GPS date and time combined.
- Returns:
The GPS date and time as a list of strings [year, month, day, hour, minute, second].
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
gps_0.get_gps_date_time()
- get_timestamp()
Get the timestamp of the current GPS time.
UiFlow2 Code Block:

MicroPython Code Block:
gps_0.get_timestamp()
- get_latitude()
Get the current latitude.
- Returns:
The current latitude in string format.
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
gps_0.get_latitude()
- get_longitude()
Get the current longitude.
- Returns:
The current longitude in string format.
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
gps_0.get_longitude()
- get_altitude()
Get the current altitude.
- Returns:
The current altitude in string format.
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
gps_0.get_altitude()
- get_satellite_num()
Get the number of satellites used for positioning.
- Returns:
The number of satellites.
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
gps_0.get_satellite_num()
- get_pos_quality()
Get the quality of the GPS position.
- Returns:
The position quality indicator.
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
gps_0.get_pos_quality()
- get_course_over_ground()
Get the course over ground (COG).
Note: Only data returned by the satellite is extracted. If the data does not display properly, it indicates that the satellite did not actually return that data.
- Returns:
The course over ground in degrees.
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
gps_0.get_course_over_ground()
- get_speed_over_ground()
Get the speed over ground (SOG).
- Returns:
The speed over ground in knots.
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
gps_0.get_speed_over_ground()
- set_time_zone(value)
Set the time zone offset for the GPS time.
- Parameters:
value (int) – The time zone offset value to set.
UiFlow2 Code Block:

MicroPython Code Block:
gps_0.set_time_zone(1)
- get_time_zone()
Get the current time zone offset.
- Returns:
The current time zone offset.
- Return type:
UiFlow2 Code Block:

MicroPython Code Block:
gps_0.get_time_zone()
- deinit()
Deinitialize the GPS unit, stopping any running tasks and releasing resources.
UiFlow2 Code Block:
MicroPython Code Block:
gps_0.deinit()