UART
UART 实现标准 UART/USART 双工串行通信协议。在物理层面上,它由 2 条线路组成:RX 和 TX。通信单位是一个字符(不要与字符串字符混淆),可以是 8 位或 9 位宽。
UiFlow2 应用示例
回声
在 UiFlow2 中打开 cores3_echo_exmaple.m5f2 项目。
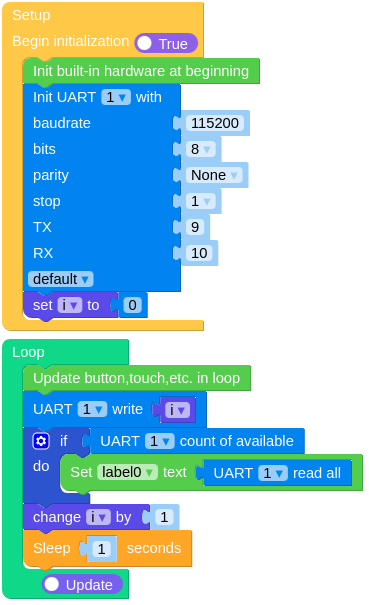
此示例演示了如何利用 UART 接口,通过将配置的 UART 上接收到的任何数据回传给发送方。
UiFlow2 代码块:
示例输出:
None
MicroPython 应用示例
回声
此示例演示了如何利用 UART 接口,通过将配置的 UART 上接收到的任何数据回传给发送方。
MicroPython 代码块:
1# SPDX-FileCopyrightText: 2024 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8from hardware import UART 9import time 10 11 12label0 = None 13uart1 = None 14 15 16i = None 17 18 19def setup(): 20 global label0, uart1, i 21 22 M5.begin() 23 Widgets.fillScreen(0x222222) 24 label0 = Widgets.Label("label0", 102, 85, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 25 26 uart1 = UART(1, baudrate=115200, bits=8, parity=None, stop=1, tx=9, rx=10) 27 i = 0 28 29 30def loop(): 31 global label0, uart1, i 32 M5.update() 33 uart1.write(i) 34 if uart1.any(): 35 label0.setText(str(uart1.read())) 36 i = (i if isinstance(i, (int, float)) else 0) + 1 37 time.sleep(1) 38 39 40if __name__ == "__main__": 41 try: 42 setup() 43 while True: 44 loop() 45 except (Exception, KeyboardInterrupt) as e: 46 try: 47 from utility import print_error_msg 48 49 print_error_msg(e) 50 except ImportError: 51 print("please update to latest firmware")
示例输出:
None
API参考
class UART
- class UART(id, baudrate=9600, bits=8, parity=None, stop=1, *, ...)
构造给定 id 的 UART 对象。
更多参数请参考 init 。
UiFlow2 代码块:
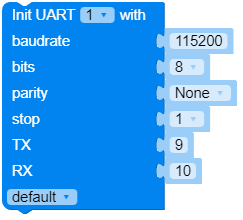
MicroPython 代码块:
from hadrware import UART uart1 = UART(1, baudrate=115200, bits=8, parity=None, stop=1, tx=9, rx=10)
- init(baudrate=9600, bits=8, parity=None, stop=1, *, ...)
使用给定的参数初始化 UART 总线。
- 参数:
- 关键字参数:
tx – 要使用的 TX 引脚。
rx – 要使用的 RX 引脚。
rts – 用于硬件接收流控制的 RTS(输出)引脚。
cts – 用于硬件传输流控制的 CTS(输入)引脚。
txbuf (int) – TX 缓冲区的长度(以字符为单位)。
rxbuf (int) – RX 缓冲区的长度(以字符为单位)。
timeout (int) – 等待第一个字符的时间(以毫秒为单位)。
timeout_char (int) – 字符之间等待的时间(以毫秒为单位)。
invert (int) – 选择要反相的线。 -
0将不会反相线(两条线的空闲状态均为逻辑高)。 -UART.INV_TX将反相 TX 线(TX 线的空闲状态变为逻辑低)。 -UART.INV_RX将反相 RX 线(RX 线的空闲状态变为逻辑低)。 -UART.INV_TX | UART.INV_RX将反相两条线(空闲状态为逻辑低)。flow (int) – 选择使用哪些硬件流控信号。该值为位掩码。
mode (int) – UART 的模式。该值为位掩码。
备注
可以对同一对象多次调用
init(),以便动态重新配置 UART。这样可以使用单个 UART 外设来为连接到不同 GPIO 引脚的不同设备提供服务。在这种情况下,一次只能为一个设备提供服务。另外,不要调用deinit(),因为它会阻止再次调用init()。UiFlow2 代码块:
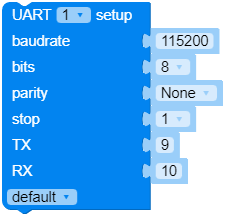
MicroPython 代码块:
uart1.init(baudrate=115200, bits=8, parity=None, stop=1, tx=9, rx=10)
- deinit()
关闭 UART 总线。
备注
在
deinit()之后,您将无法在对象上调用init()。在这种情况下,需要创建一个新实例。UiFlow2 代码块:

MicroPython 代码块:
uart1.deinit()
- any()
返回一个整数,表示可以无阻塞读取的字符数。如果没有可用字符,则返回 0;如果有字符,则返回一个正数。即使有多个字符可供读取,该方法也可能返回 1。
- 返回:
可读取的字符数。
- 返回类型:
对于更复杂的可用字符查询,请使用 select.poll:
poll = select.poll() poll.register(uart, select.POLLIN) poll.poll(timeout)
UiFlow2 代码块:

MicroPython 代码块:
print(uart1.any())
- read([nbytes])
读取字符。如果指定了
nbytes,则最多读取那么多字节,否则读取尽可能多的数据。如果达到超时,它可能会更早返回。超时可以在构造函数中配置。- 返回:
包含读入字节的字节对象。超时时返回
None。- 返回类型:
bytes or None
UiFlow2 代码块:



MicroPython 代码块:
print(uart1.read())
- readinto(buf[, nbytes])
将字节读入
buf。如果指定了nbytes,则最多读取那么多字节。否则,最多读取len(buf)个字节。如果达到超时,它可能会更早返回。超时可以在构造函数中配置。- 返回:
超时时读取并存储到
buf或None中的字节数。- 返回类型:
int or None
UiFlow2 代码块:

MicroPython 代码块:
buf = bytearray(10) uart1.readinto(buf)
- readline()
读取一行,以换行符结尾。如果达到超时,它可能会更快返回。超时可在构造函数中配置。
- 返回:
超时时读取的行或
None。- 返回类型:
str or None
UiFlow2 代码块:

MicroPython 代码块:
print(uart1.readline())
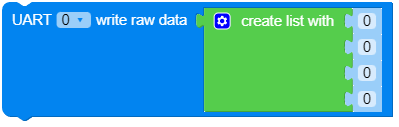
- write(buf)
将字节缓冲区写入总线。
UiFlow2 代码块:





MicroPython 代码块:
uart1.write('1234!')
- sendbreak()
在总线上发送中断条件。这会将总线驱动为低电平,持续时间比正常传输字符所需的时间更长。
UiFlow2 代码块:

MicroPython 代码块:
uart1.sendbreak()
- flush()
等待所有数据发送完毕。如果发生超时,则会引发异常。超时持续时间取决于 tx 缓冲区大小和波特率。除非启用了流量控制,否则不应发生超时。
备注
对于 rp2、esp8266 和 nrf 端口,调用将在发送最后一个字节时返回。如果需要,必须在调用脚本中添加一个字符的等待时间。
UiFlow2 代码块:
MicroPython 代码块:
uart1.flush()
- txdone()
告知是否已发送所有数据或未发生任何数据传输。在这种情况下,它返回
True。如果正在进行数据传输,则返回False。备注
对于 rp2、esp8266 和 nrf 端口,即使传输的最后一个字节仍在发送,调用也可能返回
True。如果需要,必须在调用脚本中添加一个字符的等待时间。UiFlow2 代码块:

MicroPython 代码块:
print(uart1.txdone())
- irq(handler=None, trigger=0, hard=False)
配置一个中断处理程序,在发生 UART 事件时调用。
- 参数:
handler (func) – 中断事件触发时调用的可选函数。处理程序必须只接受一个参数,即
UART实例。trigger (int) – 配置可生成中断的事件。可能的值为以下一个或多个事件的掩码:
hard (bool) – 如果为真,则使用硬件中断。这减少了引脚变化和调用处理程序之间的延迟。硬中断处理程序可能不会分配内存;请参阅 Writing interrupt handlers 。
- 返回:
返回一个 irq 对象。
由于硬件的限制,并非所有触发事件都可在所有端口上使用。
触发器的可用性 端口 / 触发器
IRQ_RXIDLE
IRQ_RX
IRQ_TXIDLE
IRQ_BREAK
CC3200
yes
ESP32
yes
yes
yes
MIMXRT
yes
yes
NRF
yes
yes
RENESAS-RA
yes
yes
RP2
yes
yes
yes
SAMD
yes
yes
yes
STM32
yes
yes
备注
ESP32 端口不支持选项 hard=True。
仅当消息长度超过5个字符时,rp2端口的UART.IRQ_TXIDLE才会触发,并且当仍有5个字符需要发送时才会触发。
rp2端口的UART.IRQ_BREAK需要接收有效字符才能再次触发。
发送最后一个字符时,触发SAND端口UART.IRQ IDLE。
在 STM32F4xx MCU 上,使用触发器 UART.IRQ_RXIDLE,当线路空闲时,处理程序将在第一个字符之后调用一次,然后在消息结束后调用一次。
有效性:cc3200、esp32、mimxrt、nrf、renesas-ra、rp2、samd、stm32。
- RTS
- CTS
流量控制选项。
- MODE_UART
- MODE_RS485_HALF_DUPLEX
- MODE_IRDA
- MODE_RS485_COLLISION_DETECT
- MODE_RS485_APP_CTRL
UART 模式选项。
- IRQ_RXIDLE
- IRQ_RX
- IRQ_TXIDLE
- IRQ_BREAK
IRQ 触发源。