StackChan
Support the following products:

UiFlow2 Example
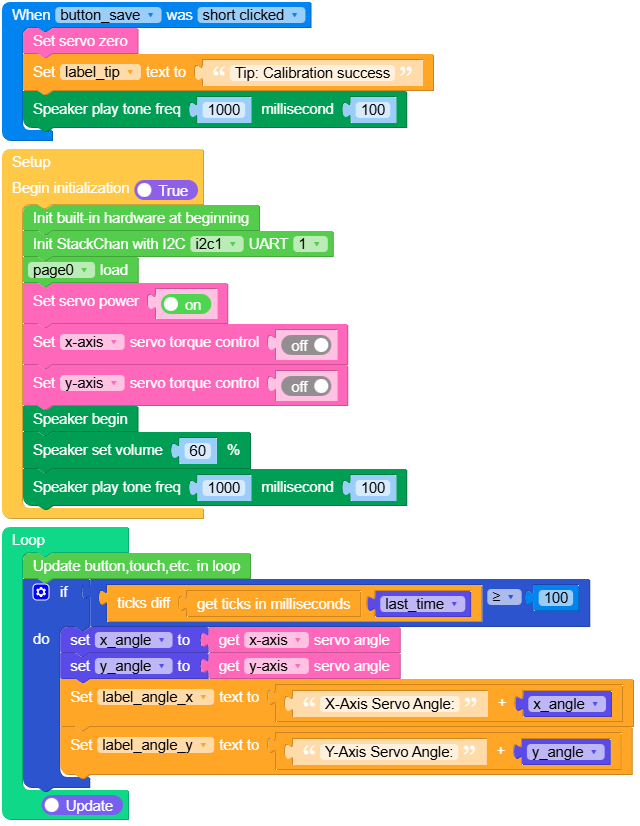
Servo zero calibration
Note
Mechanical assembly varies between units. After flashing new firmware, calibrate the servo zero reference manually.
Open the stackchan_servo_zero_calibrate.m5f2 project in UiFlow2.
Run the program.
Move the head by hand: on X, align the display with the base orientation; on Y, set the display perpendicular to the base.
Tap Save button.
UiFlow2 Code Block:
Example output:
None
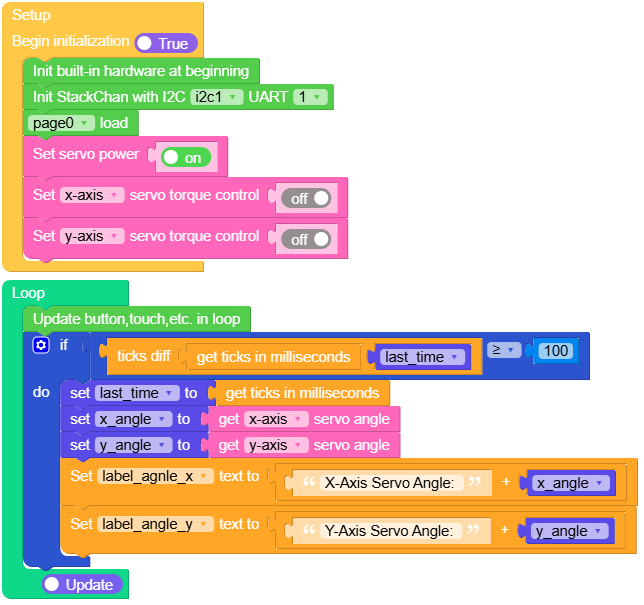
Servo angle read
Open the stackchan_servo_read_example.m5f2 project in UiFlow2.
This example demonstrates reading X and Y servo angles in degrees with torque disabled so the head can move freely.
Note
Torque on holds the last target and resists moving by hand. Torque off lets you pose the head freely while readings update—handy for checking calibration.
UiFlow2 Code Block:
Example output:
None
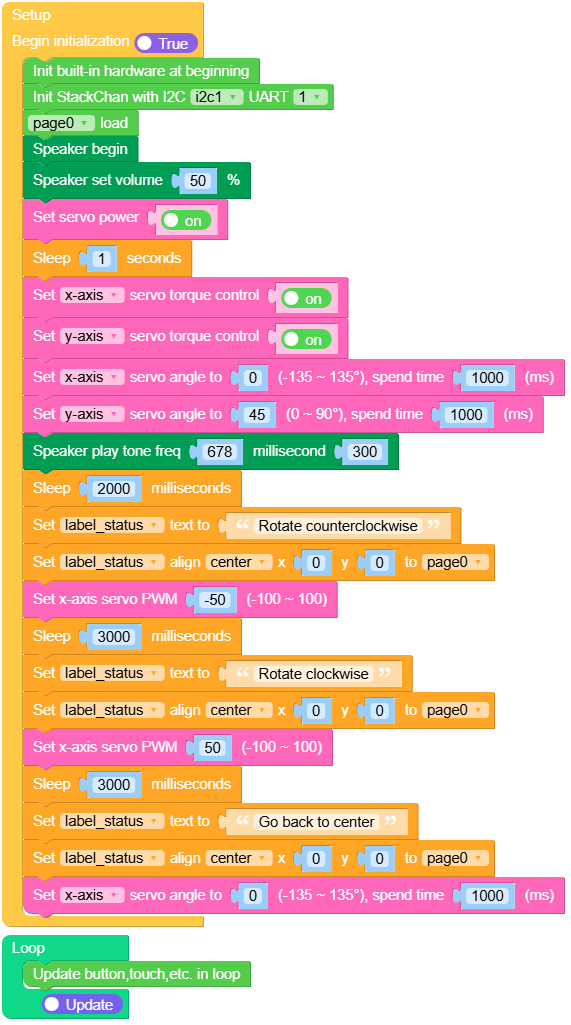
Servo control
Open the stackchan_servo_control_example.m5f2 project in UiFlow2.
This example demonstrates moving the servos to commanded positions and driving the X servo in PWM mode using set_servo_angle and set_servo_x_pwm.
UiFlow2 Code Block:
Example output:
None
Face tracking
Open the stackchan_face_tracking_example.m5f2 project in UiFlow2.
This demo implements face tracking.
UiFlow2 Code Block:
Example output:
None
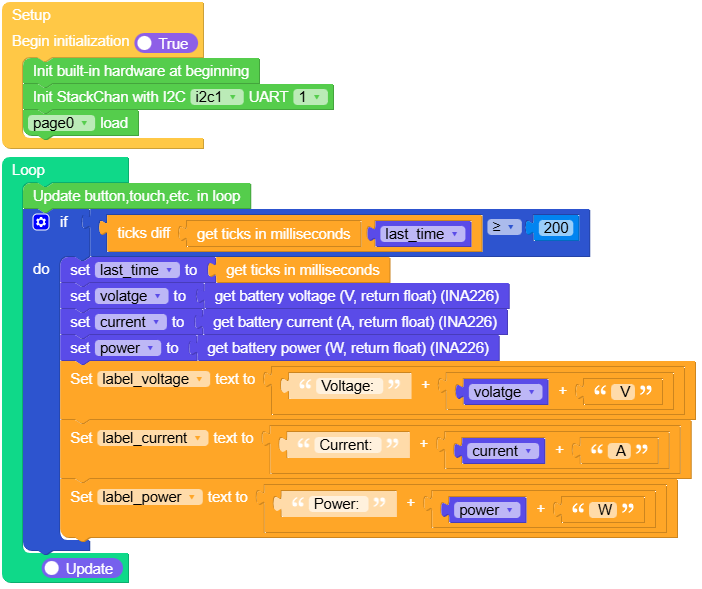
Servo power info
Open the stackchan_servo_power_example.m5f2 project in UiFlow2.
This example demonstrates read and display servo power information.
UiFlow2 Code Block:
Example output:
None
Touch & RGB
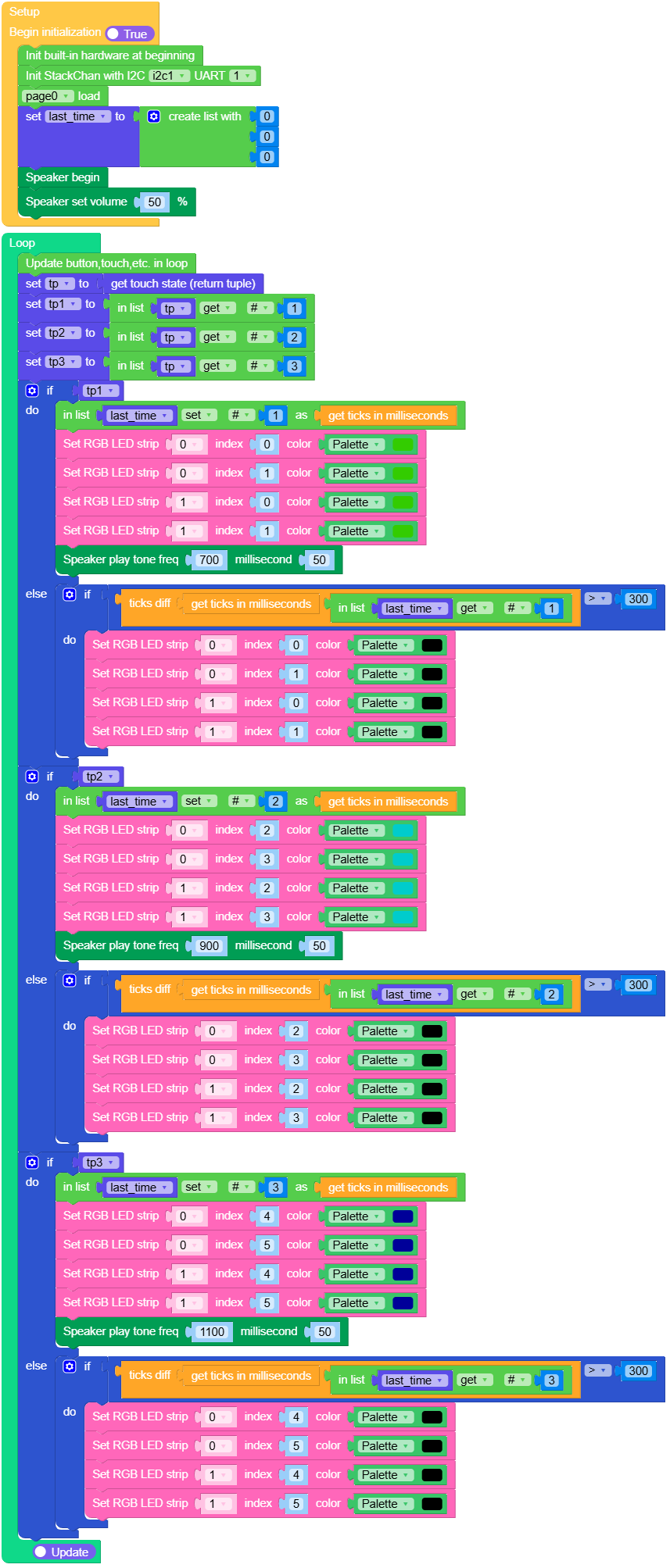
Open the stackchan_tp_rgb_example.m5f2 project in UiFlow2.
This example demonstrates mapping touch zones to RGB strip colours (three logical touch points on two strips).
UiFlow2 Code Block:
Example output:
None
NFC
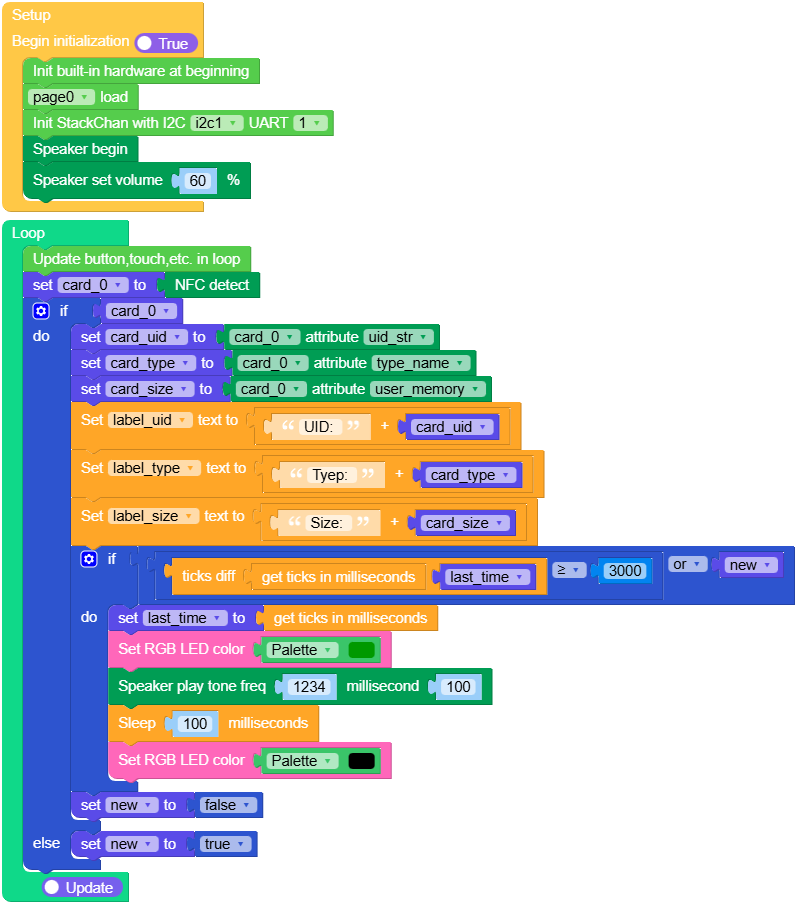
Open the stackchan_nfc_detect_example.m5f2 project in UiFlow2.
This example demonstrates detecting NFC tags and displaying UID and tag type on screen.
For the full NFC Unit API reference (detect, read/write, tag types, etc.), see NFC Unit.
UiFlow2 Code Block:
Example output:
None
Infrared (IR)
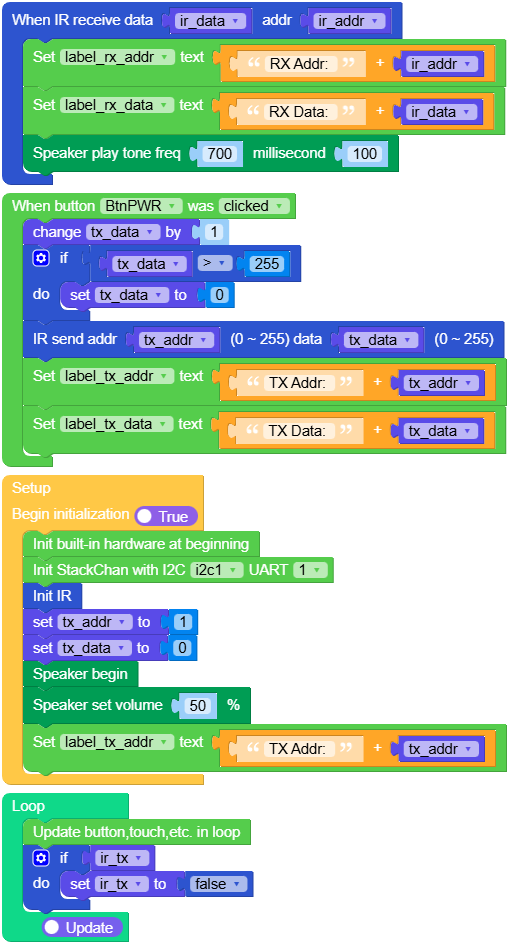
Open the stackchan_ir_tx_rx_example.m5f2 project in UiFlow2.
This example demonstrates infrared transmit and receive in NEC style.
UiFlow2 Code Block:
Example output:
None
MicroPython Example
Servo zero calibration
Note
Mechanical assembly varies between units. After flashing new firmware, calibrate the servo zero reference manually.
Run the program.
Move the head by hand: on X, align the display with the base orientation; on Y, set the display perpendicular to the base.
Tap Save button.
MicroPython Code Block:
1# SPDX-FileCopyrightText: 2026 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8import m5ui 9import lvgl as lv 10import time 11from hardware.stackchan import StackChan 12 13 14page0 = None 15label_title = None 16button_save = None 17label_angle_x = None 18label_angle_y = None 19label_tip = None 20stackchan = None 21x_angle = None 22y_angle = None 23last_time = None 24 25 26def button_save_short_clicked_event(event_struct): 27 global \ 28 page0, \ 29 label_title, \ 30 button_save, \ 31 label_angle_x, \ 32 label_angle_y, \ 33 label_tip, \ 34 stackchan, \ 35 x_angle, \ 36 y_angle, \ 37 last_time 38 stackchan.set_servo_zero() 39 label_tip.set_text(str("Tip: Calibration success")) 40 Speaker.tone(1000, 100) 41 42 43def button_save_event_handler(event_struct): 44 global \ 45 page0, \ 46 label_title, \ 47 button_save, \ 48 label_angle_x, \ 49 label_angle_y, \ 50 label_tip, \ 51 stackchan, \ 52 x_angle, \ 53 y_angle, \ 54 last_time 55 event = event_struct.code 56 if event == lv.EVENT.SHORT_CLICKED and True: 57 button_save_short_clicked_event(event_struct) 58 return 59 60 61def setup(): 62 global \ 63 page0, \ 64 label_title, \ 65 button_save, \ 66 label_angle_x, \ 67 label_angle_y, \ 68 label_tip, \ 69 stackchan, \ 70 x_angle, \ 71 y_angle, \ 72 last_time 73 74 M5.begin() 75 Widgets.setRotation(1) 76 m5ui.init() 77 page0 = m5ui.M5Page(bg_c=0x000000) 78 label_title = m5ui.M5Label( 79 "Servo Calibration", 80 x=55, 81 y=5, 82 text_c=0x0DC9F4, 83 bg_c=0x000000, 84 bg_opa=0, 85 font=lv.font_montserrat_24, 86 parent=page0, 87 ) 88 button_save = m5ui.M5Button( 89 text="Save", 90 x=128, 91 y=195, 92 bg_c=0x2196F3, 93 text_c=0xFFFFFF, 94 font=lv.font_montserrat_14, 95 parent=page0, 96 ) 97 label_angle_x = m5ui.M5Label( 98 "X-Axis Servo Angle:", 99 x=10, 100 y=130, 101 text_c=0x0DC9F4, 102 bg_c=0x000000, 103 bg_opa=0, 104 font=lv.font_montserrat_18, 105 parent=page0, 106 ) 107 label_angle_y = m5ui.M5Label( 108 "Y-Axis Servo Angle:", 109 x=8, 110 y=160, 111 text_c=0x0DC9F4, 112 bg_c=0x000000, 113 bg_opa=0, 114 font=lv.font_montserrat_18, 115 parent=page0, 116 ) 117 label_tip = m5ui.M5Label( 118 "Tip:Move by hand, tap Save.", 119 x=33, 120 y=70, 121 text_c=0xD2E711, 122 bg_c=0xFFFFFF, 123 bg_opa=0, 124 font=lv.font_montserrat_18, 125 parent=page0, 126 ) 127 128 button_save.add_event_cb(button_save_event_handler, lv.EVENT.ALL, None) 129 130 stackchan = StackChan(i2c=1, uart=1) 131 page0.screen_load() 132 stackchan.set_servo_power(enable=True) 133 stackchan.set_servo_torque(stackchan.SERVO_ID_X, enable=False) 134 stackchan.set_servo_torque(stackchan.SERVO_ID_Y, enable=False) 135 Speaker.begin() 136 Speaker.setVolumePercentage(0.6) 137 Speaker.tone(1000, 100) 138 139 140def loop(): 141 global \ 142 page0, \ 143 label_title, \ 144 button_save, \ 145 label_angle_x, \ 146 label_angle_y, \ 147 label_tip, \ 148 stackchan, \ 149 x_angle, \ 150 y_angle, \ 151 last_time 152 M5.update() 153 if (time.ticks_diff((time.ticks_ms()), last_time)) >= 100: 154 x_angle = stackchan.get_servo_angle(stackchan.SERVO_ID_X) 155 y_angle = stackchan.get_servo_angle(stackchan.SERVO_ID_Y) 156 label_angle_x.set_text(str((str("X-Axis Servo Angle:") + str(x_angle)))) 157 label_angle_y.set_text(str((str("Y-Axis Servo Angle:") + str(y_angle)))) 158 159 160if __name__ == "__main__": 161 try: 162 setup() 163 while True: 164 loop() 165 except (Exception, KeyboardInterrupt) as e: 166 try: 167 m5ui.deinit() 168 from utility import print_error_msg 169 170 print_error_msg(e) 171 except ImportError: 172 print("please update to latest firmware")
Example output:
None
Servo angle read
This example demonstrates reading X and Y servo angles in degrees with torque disabled so the head can move freely.
Note
Torque on holds the last target and resists moving by hand. Torque off lets you pose the head freely while readings update—handy for checking calibration.
MicroPython Code Block:
1import os, sys, io 2import M5 3from M5 import * 4import m5ui 5import lvgl as lv 6import time 7from hardware.stackchan import StackChan 8 9 10page0 = None 11label_title = None 12label_agnle_x = None 13label_angle_y = None 14stackchan = None 15last_time = None 16x_angle = None 17y_angle = None 18 19 20def setup(): 21 global page0, label_title, label_agnle_x, label_angle_y, stackchan, last_time, x_angle, y_angle 22 23 M5.begin() 24 Widgets.setRotation(1) 25 m5ui.init() 26 page0 = m5ui.M5Page(bg_c=0x000000) 27 label_title = m5ui.M5Label( 28 "Servo Read Example", 29 x=34, 30 y=10, 31 text_c=0x0DC9F4, 32 bg_c=0x000000, 33 bg_opa=0, 34 font=lv.font_montserrat_24, 35 parent=page0, 36 ) 37 label_agnle_x = m5ui.M5Label( 38 "X-Axis Servo Angle:", 39 x=10, 40 y=80, 41 text_c=0x0DC9F4, 42 bg_c=0x000000, 43 bg_opa=0, 44 font=lv.font_montserrat_24, 45 parent=page0, 46 ) 47 label_angle_y = m5ui.M5Label( 48 "Y-Axis Servo Angle:", 49 x=10, 50 y=125, 51 text_c=0x0DC9F4, 52 bg_c=0x000000, 53 bg_opa=0, 54 font=lv.font_montserrat_24, 55 parent=page0, 56 ) 57 58 stackchan = StackChan(i2c=1, uart=1) 59 page0.screen_load() 60 stackchan.set_servo_power(enable=True) 61 stackchan.set_servo_torque(stackchan.SERVO_ID_X, enable=False) 62 stackchan.set_servo_torque(stackchan.SERVO_ID_Y, enable=False) 63 64 65def loop(): 66 global page0, label_title, label_agnle_x, label_angle_y, stackchan, last_time, x_angle, y_angle 67 M5.update() 68 if (time.ticks_diff((time.ticks_ms()), last_time)) >= 100: 69 last_time = time.ticks_ms() 70 x_angle = stackchan.get_servo_angle(stackchan.SERVO_ID_X) 71 y_angle = stackchan.get_servo_angle(stackchan.SERVO_ID_Y) 72 label_agnle_x.set_text(str((str("X-Axis Servo Angle: ") + str(x_angle)))) 73 label_angle_y.set_text(str((str("Y-Axis Servo Angle: ") + str(y_angle)))) 74 75 76if __name__ == "__main__": 77 try: 78 setup() 79 while True: 80 loop() 81 except (Exception, KeyboardInterrupt) as e: 82 try: 83 m5ui.deinit() 84 from utility import print_error_msg 85 86 print_error_msg(e) 87 except ImportError: 88 print("please update to latest firmware")
Example output:
None
Servo control
This example demonstrates moving the servos to commanded positions and driving the X servo in PWM mode using set_servo_angle and set_servo_x_pwm.
MicroPython Code Block:
1# SPDX-FileCopyrightText: 2026 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8import m5ui 9import lvgl as lv 10import time 11from hardware.stackchan import StackChan 12 13 14page0 = None 15label_title = None 16label_status = None 17stackchan = None 18 19 20def setup(): 21 global page0, label_title, label_status, stackchan 22 23 M5.begin() 24 Widgets.setRotation(1) 25 m5ui.init() 26 page0 = m5ui.M5Page(bg_c=0x000000) 27 label_title = m5ui.M5Label( 28 "Servo Control Example", 29 x=20, 30 y=5, 31 text_c=0x0DC9F4, 32 bg_c=0x000000, 33 bg_opa=0, 34 font=lv.font_montserrat_24, 35 parent=page0, 36 ) 37 label_status = m5ui.M5Label( 38 "--", 39 x=153, 40 y=115, 41 text_c=0x0DC9F4, 42 bg_c=0xFFFFFF, 43 bg_opa=0, 44 font=lv.font_montserrat_16, 45 parent=page0, 46 ) 47 48 stackchan = StackChan(i2c=1, uart=1) 49 page0.screen_load() 50 Speaker.begin() 51 Speaker.setVolumePercentage(0.5) 52 stackchan.set_servo_power(enable=True) 53 stackchan.set_servo_torque(stackchan.SERVO_ID_X, enable=True) 54 stackchan.set_servo_torque(stackchan.SERVO_ID_X, enable=True) 55 stackchan.set_servo_angle(stackchan.SERVO_ID_X, 0, 1000, 0) 56 stackchan.set_servo_angle(stackchan.SERVO_ID_Y, 45, 1000, 0) 57 Speaker.tone(678, 300) 58 time.sleep_ms(2000) 59 label_status.set_text(str("Rotate counterclockwise")) 60 label_status.align_to(page0, lv.ALIGN.CENTER, 0, 0) 61 stackchan.set_servo_x_pwm(-50) 62 time.sleep_ms(3000) 63 label_status.set_text(str("Rotate clockwise")) 64 label_status.align_to(page0, lv.ALIGN.CENTER, 0, 0) 65 stackchan.set_servo_x_pwm(50) 66 time.sleep_ms(3000) 67 label_status.set_text(str("Go back to center")) 68 label_status.align_to(page0, lv.ALIGN.CENTER, 0, 0) 69 stackchan.set_servo_angle(stackchan.SERVO_ID_X, 0, 1000, 0) 70 71 72def loop(): 73 global page0, label_title, label_status, stackchan 74 M5.update() 75 76 77if __name__ == "__main__": 78 try: 79 setup() 80 while True: 81 loop() 82 except (Exception, KeyboardInterrupt) as e: 83 try: 84 m5ui.deinit() 85 from utility import print_error_msg 86 87 print_error_msg(e) 88 except ImportError: 89 print("please update to latest firmware")
Example output:
None
Face tracking
This example implements face tracking.
MicroPython Code Block:
1import os, sys, io 2import M5 3from M5 import * 4import camera 5import dl 6import image 7from hardware.stackchan import StackChan 8 9 10stackchan = None 11 12 13import math 14 15img = None 16dl_detection_result = None 17dl_detector = None 18lost_frame = None 19res = None 20bbox = None 21f_x = None 22f_y = None 23neutral = None 24SMOOTH = None 25f_w = None 26DEADZONE_NORM = None 27f_h = None 28Y_NEUTRAL = None 29f_cx = None 30img_cx = None 31f_cy = None 32img_cy = None 33ex = None 34angle_x = None 35ey = None 36angle_y = None 37x_target = None 38y_target = None 39 40 41def setup(): 42 global \ 43 stackchan, \ 44 img, \ 45 dl_detection_result, \ 46 dl_detector, \ 47 lost_frame, \ 48 res, \ 49 bbox, \ 50 f_x, \ 51 f_y, \ 52 neutral, \ 53 SMOOTH, \ 54 f_w, \ 55 DEADZONE_NORM, \ 56 f_h, \ 57 Y_NEUTRAL, \ 58 f_cx, \ 59 img_cx, \ 60 f_cy, \ 61 img_cy, \ 62 ex, \ 63 angle_x, \ 64 ey, \ 65 angle_y, \ 66 x_target, \ 67 y_target 68 69 M5.begin() 70 Widgets.setRotation(1) 71 Widgets.fillScreen(0x222222) 72 73 stackchan = StackChan(i2c=1, uart=1) 74 camera.init(pixformat=camera.RGB565, framesize=camera.QVGA) 75 dl_detector = dl.ObjectDetector(dl.model.HUMAN_FACE_DETECT) 76 stackchan.set_servo_power(enable=True) 77 stackchan.set_servo_torque(stackchan.SERVO_ID_X, enable=True) 78 stackchan.set_servo_torque(stackchan.SERVO_ID_Y, enable=True) 79 stackchan.set_servo_angle(stackchan.SERVO_ID_X, 0, 0, 0) 80 stackchan.set_servo_angle(stackchan.SERVO_ID_Y, 45, 0, 0) 81 SMOOTH = 0.1 82 DEADZONE_NORM = 0.06 83 Y_NEUTRAL = 45 84 img_cx = 160 85 img_cy = 120 86 angle_x = 0 87 angle_y = Y_NEUTRAL 88 neutral = True 89 90 91def loop(): 92 global \ 93 stackchan, \ 94 img, \ 95 dl_detection_result, \ 96 dl_detector, \ 97 lost_frame, \ 98 res, \ 99 bbox, \ 100 f_x, \ 101 f_y, \ 102 neutral, \ 103 SMOOTH, \ 104 f_w, \ 105 DEADZONE_NORM, \ 106 f_h, \ 107 Y_NEUTRAL, \ 108 f_cx, \ 109 img_cx, \ 110 f_cy, \ 111 img_cy, \ 112 ex, \ 113 angle_x, \ 114 ey, \ 115 angle_y, \ 116 x_target, \ 117 y_target 118 M5.update() 119 img = camera.snapshot() 120 dl_detection_result = dl_detector.infer(img) 121 if dl_detection_result: 122 lost_frame = 0 123 res = dl_detection_result[0] 124 bbox = res.bbox() 125 f_x = res.x() 126 f_y = res.y() 127 f_w = res.w() 128 f_h = res.h() 129 f_cx = int(f_x + f_w * 0.5) 130 f_cy = int(f_y + f_h * 0.5) 131 ex = (f_cx - img_cx) / img_cx 132 ey = (f_cy - img_cy) / img_cy 133 if math.fabs(ex) < DEADZONE_NORM: 134 ex = 0 135 if math.fabs(ey) < DEADZONE_NORM: 136 ey = 0 137 x_target = min(max(ex * -135, -135), 135) 138 y_target = min(max(Y_NEUTRAL - Y_NEUTRAL * ey, 0), 90) 139 angle_x = angle_x + SMOOTH * (x_target - angle_x) 140 angle_y = angle_y + SMOOTH * (y_target - angle_y) 141 stackchan.set_servo_angle(stackchan.SERVO_ID_X, angle_x, 100, 0) 142 stackchan.set_servo_angle(stackchan.SERVO_ID_Y, angle_y, 100, 0) 143 neutral = False 144 lost_frame = 0 145 img.draw_rectangle(f_x, f_y, f_w, f_h, color=0x6600CC, thickness=3, fill=False) 146 else: 147 lost_frame = (lost_frame if isinstance(lost_frame, (int, float)) else 0) + 1 148 if lost_frame > 20 and not neutral: 149 stackchan.set_servo_angle(stackchan.SERVO_ID_X, 0, 1000, 0) 150 stackchan.set_servo_angle(stackchan.SERVO_ID_Y, 45, 1000, 0) 151 neutral = True 152 M5.Lcd.show(img, 0, 0, 320, 240) 153 154 155if __name__ == "__main__": 156 try: 157 setup() 158 while True: 159 loop() 160 except (Exception, KeyboardInterrupt) as e: 161 try: 162 from utility import print_error_msg 163 164 print_error_msg(e) 165 except ImportError: 166 print("please update to latest firmware")
Example output:
None
Servo power info
This example demonstrates read and display servo power information.
MicroPython Code Block:
1# SPDX-FileCopyrightText: 2026 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8import m5ui 9import lvgl as lv 10import time 11from hardware.stackchan import StackChan 12 13 14page0 = None 15label_title = None 16label_voltage = None 17label_current = None 18label_power = None 19stackchan = None 20last_time = None 21volatge = None 22current = None 23power = None 24 25 26def setup(): 27 global \ 28 page0, \ 29 label_title, \ 30 label_voltage, \ 31 label_current, \ 32 label_power, \ 33 stackchan, \ 34 last_time, \ 35 volatge, \ 36 current, \ 37 power 38 39 M5.begin() 40 Widgets.setRotation(1) 41 m5ui.init() 42 page0 = m5ui.M5Page(bg_c=0x000000) 43 label_title = m5ui.M5Label( 44 "Servo Power Info", 45 x=56, 46 y=5, 47 text_c=0x0DC9F4, 48 bg_c=0x000000, 49 bg_opa=0, 50 font=lv.font_montserrat_24, 51 parent=page0, 52 ) 53 label_voltage = m5ui.M5Label( 54 "Voltage:", 55 x=10, 56 y=80, 57 text_c=0x0DC9F4, 58 bg_c=0x000000, 59 bg_opa=0, 60 font=lv.font_montserrat_24, 61 parent=page0, 62 ) 63 label_current = m5ui.M5Label( 64 "Current:", 65 x=10, 66 y=115, 67 text_c=0x0DC9F4, 68 bg_c=0x000000, 69 bg_opa=0, 70 font=lv.font_montserrat_24, 71 parent=page0, 72 ) 73 label_power = m5ui.M5Label( 74 "Power:", 75 x=25, 76 y=150, 77 text_c=0x0DC9F4, 78 bg_c=0x000000, 79 bg_opa=0, 80 font=lv.font_montserrat_24, 81 parent=page0, 82 ) 83 84 stackchan = StackChan(i2c=1, uart=1) 85 page0.screen_load() 86 87 88def loop(): 89 global \ 90 page0, \ 91 label_title, \ 92 label_voltage, \ 93 label_current, \ 94 label_power, \ 95 stackchan, \ 96 last_time, \ 97 volatge, \ 98 current, \ 99 power 100 M5.update() 101 if (time.ticks_diff((time.ticks_ms()), last_time)) >= 200: 102 last_time = time.ticks_ms() 103 volatge = stackchan.get_battery_voltage() 104 current = stackchan.get_battery_current() 105 power = stackchan.get_battery_power() 106 label_voltage.set_text(str((str("Voltage: ") + str((str(volatge) + str(" V")))))) 107 label_current.set_text(str((str("Current: ") + str((str(current) + str(" A")))))) 108 label_power.set_text(str((str("Power: ") + str((str(power) + str(" W")))))) 109 110 111if __name__ == "__main__": 112 try: 113 setup() 114 while True: 115 loop() 116 except (Exception, KeyboardInterrupt) as e: 117 try: 118 m5ui.deinit() 119 from utility import print_error_msg 120 121 print_error_msg(e) 122 except ImportError: 123 print("please update to latest firmware")
Example output:
None
Touch & RGB
This example demonstrates mapping touch zones to RGB strip colours (three logical touch points on two strips).
MicroPython Code Block:
1# SPDX-FileCopyrightText: 2026 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8import m5ui 9import lvgl as lv 10import time 11from hardware.stackchan import StackChan 12 13 14page0 = None 15label_title = None 16stackchan = None 17tp = None 18tp1 = None 19last_time = None 20tp2 = None 21tp3 = None 22 23 24def setup(): 25 global page0, label_title, stackchan, tp, tp1, last_time, tp2, tp3 26 27 M5.begin() 28 Widgets.setRotation(1) 29 m5ui.init() 30 page0 = m5ui.M5Page(bg_c=0x000000) 31 label_title = m5ui.M5Label( 32 "TP & RGB Strip Example", 33 x=13, 34 y=10, 35 text_c=0x0DC9F4, 36 bg_c=0x000000, 37 bg_opa=0, 38 font=lv.font_montserrat_24, 39 parent=page0, 40 ) 41 42 stackchan = StackChan(i2c=1, uart=1) 43 page0.screen_load() 44 last_time = [0, 0, 0] 45 Speaker.begin() 46 Speaker.setVolumePercentage(0.5) 47 48 49def loop(): 50 global page0, label_title, stackchan, tp, tp1, last_time, tp2, tp3 51 M5.update() 52 tp = stackchan.get_touch() 53 tp1 = tp[0] 54 tp2 = tp[1] 55 tp3 = tp[2] 56 if tp1: 57 last_time[0] = time.ticks_ms() 58 stackchan.set_rgb_color(0, 0, 0x33CC00) 59 stackchan.set_rgb_color(0, 1, 0x33CC00) 60 stackchan.set_rgb_color(1, 0, 0x33CC00) 61 stackchan.set_rgb_color(1, 1, 0x33CC00) 62 Speaker.tone(700, 50) 63 else: 64 if (time.ticks_diff((time.ticks_ms()), (last_time[0]))) > 300: 65 stackchan.set_rgb_color(0, 0, 0x000000) 66 stackchan.set_rgb_color(0, 1, 0x000000) 67 stackchan.set_rgb_color(1, 0, 0x000000) 68 stackchan.set_rgb_color(1, 1, 0x000000) 69 if tp2: 70 last_time[1] = time.ticks_ms() 71 stackchan.set_rgb_color(0, 2, 0x00CCCC) 72 stackchan.set_rgb_color(0, 3, 0x00CCCC) 73 stackchan.set_rgb_color(1, 2, 0x00CCCC) 74 stackchan.set_rgb_color(1, 3, 0x00CCCC) 75 Speaker.tone(900, 50) 76 else: 77 if (time.ticks_diff((time.ticks_ms()), (last_time[1]))) > 300: 78 stackchan.set_rgb_color(0, 2, 0x000000) 79 stackchan.set_rgb_color(0, 3, 0x000000) 80 stackchan.set_rgb_color(1, 2, 0x000000) 81 stackchan.set_rgb_color(1, 3, 0x000000) 82 if tp3: 83 last_time[2] = time.ticks_ms() 84 stackchan.set_rgb_color(0, 4, 0x000099) 85 stackchan.set_rgb_color(0, 5, 0x000099) 86 stackchan.set_rgb_color(1, 4, 0x000099) 87 stackchan.set_rgb_color(1, 5, 0x000099) 88 Speaker.tone(1100, 50) 89 else: 90 if (time.ticks_diff((time.ticks_ms()), (last_time[2]))) > 300: 91 stackchan.set_rgb_color(0, 4, 0x000000) 92 stackchan.set_rgb_color(0, 5, 0x000000) 93 stackchan.set_rgb_color(1, 4, 0x000000) 94 stackchan.set_rgb_color(1, 5, 0x000000) 95 96 97if __name__ == "__main__": 98 try: 99 setup() 100 while True: 101 loop() 102 except (Exception, KeyboardInterrupt) as e: 103 try: 104 m5ui.deinit() 105 from utility import print_error_msg 106 107 print_error_msg(e) 108 except ImportError: 109 print("please update to latest firmware")
Example output:
None
NFC
This example demonstrates detecting NFC tags and displaying UID and tag type on screen.
For the full NFC Unit API reference (detect, read/write, tag types, etc.), see NFC Unit.
MicroPython Code Block:
1# SPDX-FileCopyrightText: 2026 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8import m5ui 9import lvgl as lv 10import time 11from hardware.stackchan import StackChan 12 13 14page0 = None 15label_title = None 16label_uid = None 17label_type = None 18label_size = None 19stackchan = None 20card_0 = None 21card_uid = None 22new = None 23card_type = None 24card_size = None 25last_time = None 26 27 28def setup(): 29 global \ 30 page0, \ 31 label_title, \ 32 label_uid, \ 33 label_type, \ 34 label_size, \ 35 stackchan, \ 36 card_0, \ 37 card_uid, \ 38 new, \ 39 card_type, \ 40 card_size, \ 41 last_time 42 43 M5.begin() 44 Widgets.setRotation(1) 45 m5ui.init() 46 page0 = m5ui.M5Page(bg_c=0x000000) 47 label_title = m5ui.M5Label( 48 "NFC Card detect", 49 x=58, 50 y=5, 51 text_c=0x13C2EB, 52 bg_c=0xFFFFFF, 53 bg_opa=0, 54 font=lv.font_montserrat_24, 55 parent=page0, 56 ) 57 label_uid = m5ui.M5Label( 58 "UID:", 59 x=18, 60 y=70, 61 text_c=0xFFFFFF, 62 bg_c=0xFFFFFF, 63 bg_opa=0, 64 font=lv.font_montserrat_16, 65 parent=page0, 66 ) 67 label_type = m5ui.M5Label( 68 "Tyep:", 69 x=10, 70 y=100, 71 text_c=0xFFFFFF, 72 bg_c=0xFFFFFF, 73 bg_opa=0, 74 font=lv.font_montserrat_16, 75 parent=page0, 76 ) 77 label_size = m5ui.M5Label( 78 "Size:", 79 x=16, 80 y=130, 81 text_c=0xFFFFFF, 82 bg_c=0xFFFFFF, 83 bg_opa=0, 84 font=lv.font_montserrat_16, 85 parent=page0, 86 ) 87 88 page0.screen_load() 89 stackchan = StackChan(i2c=1, uart=1) 90 Speaker.begin() 91 Speaker.setVolumePercentage(0.6) 92 93 94def loop(): 95 global \ 96 page0, \ 97 label_title, \ 98 label_uid, \ 99 label_type, \ 100 label_size, \ 101 stackchan, \ 102 card_0, \ 103 card_uid, \ 104 new, \ 105 card_type, \ 106 card_size, \ 107 last_time 108 M5.update() 109 card_0 = stackchan.nfc.detect() 110 if card_0: 111 card_uid = card_0.uid_str 112 card_type = card_0.type_name 113 card_size = card_0.user_memory 114 label_uid.set_text(str((str("UID: ") + str(card_uid)))) 115 label_type.set_text(str((str("Tyep: ") + str(card_type)))) 116 label_size.set_text(str((str("Size: ") + str(card_size)))) 117 if (time.ticks_diff((time.ticks_ms()), last_time)) >= 3000 or new: 118 last_time = time.ticks_ms() 119 stackchan.set_rgb_color(0x009900) 120 Speaker.tone(1234, 100) 121 time.sleep_ms(100) 122 stackchan.set_rgb_color(0x000000) 123 new = False 124 else: 125 new = True 126 127 128if __name__ == "__main__": 129 try: 130 setup() 131 while True: 132 loop() 133 except (Exception, KeyboardInterrupt) as e: 134 try: 135 m5ui.deinit() 136 from utility import print_error_msg 137 138 print_error_msg(e) 139 except ImportError: 140 print("please update to latest firmware")
Example output:
None
Infrared (IR)
This example demonstrates infrared transmit and receive in NEC style.
MicroPython Code Block:
1# SPDX-FileCopyrightText: 2026 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8from hardware import IR 9from hardware.stackchan import StackChan 10 11 12label_title = None 13label_tx_addr = None 14label_tx_data = None 15label_rx_addr = None 16label_rx_data = None 17ir = None 18stackchan = None 19ir_data = None 20ir_addr = None 21tx_data = None 22ir_tx = None 23tx_addr = None 24 25 26def ir_rx_event(_data, _addr, _ctrl): 27 global \ 28 label_title, \ 29 label_tx_addr, \ 30 label_tx_data, \ 31 label_rx_addr, \ 32 label_rx_data, \ 33 ir, \ 34 stackchan, \ 35 ir_data, \ 36 ir_addr, \ 37 tx_data, \ 38 ir_tx, \ 39 tx_addr 40 ir_data = _data 41 ir_addr = _addr 42 label_rx_addr.setText(str((str("RX Addr: ") + str(ir_addr)))) 43 label_rx_data.setText(str((str("RX Data: ") + str(ir_data)))) 44 Speaker.tone(700, 100) 45 46 47def btn_pwr_was_clicked_event(state): 48 global \ 49 label_title, \ 50 label_tx_addr, \ 51 label_tx_data, \ 52 label_rx_addr, \ 53 label_rx_data, \ 54 ir, \ 55 stackchan, \ 56 ir_data, \ 57 ir_addr, \ 58 tx_data, \ 59 ir_tx, \ 60 tx_addr 61 tx_data = (tx_data if isinstance(tx_data, (int, float)) else 0) + 1 62 if tx_data > 255: 63 tx_data = 0 64 ir.tx(tx_addr, tx_data) 65 label_tx_addr.setText(str((str("TX Addr: ") + str(tx_addr)))) 66 label_tx_data.setText(str((str("TX Data: ") + str(tx_data)))) 67 68 69def setup(): 70 global \ 71 label_title, \ 72 label_tx_addr, \ 73 label_tx_data, \ 74 label_rx_addr, \ 75 label_rx_data, \ 76 ir, \ 77 stackchan, \ 78 ir_data, \ 79 ir_addr, \ 80 tx_data, \ 81 ir_tx, \ 82 tx_addr 83 84 M5.begin() 85 Widgets.setRotation(1) 86 Widgets.fillScreen(0x000000) 87 label_title = Widgets.Label( 88 "IR TX & RX Example", 41, 5, 1.0, 0x0DC9F4, 0x000000, Widgets.FONTS.Montserrat24 89 ) 90 label_tx_addr = Widgets.Label( 91 "TX Addr:", 9, 59, 1.0, 0xFFFFFF, 0x000000, Widgets.FONTS.Montserrat18 92 ) 93 label_tx_data = Widgets.Label( 94 "TX Data:", 170, 59, 1.0, 0xFFFFFF, 0x000000, Widgets.FONTS.Montserrat18 95 ) 96 label_rx_addr = Widgets.Label( 97 "RX Addr:", 10, 100, 1.0, 0xFFFFFF, 0x000000, Widgets.FONTS.Montserrat18 98 ) 99 label_rx_data = Widgets.Label( 100 "RX Data:", 170, 100, 1.0, 0xFFFFFF, 0x000000, Widgets.FONTS.Montserrat18 101 ) 102 103 BtnPWR.setCallback(type=BtnPWR.CB_TYPE.WAS_CLICKED, cb=btn_pwr_was_clicked_event) 104 105 stackchan = StackChan(i2c=1, uart=1) 106 ir = IR() 107 ir.rx_cb(ir_rx_event) 108 tx_addr = 1 109 tx_data = 0 110 Speaker.begin() 111 Speaker.setVolumePercentage(0.5) 112 label_tx_addr.setText(str((str("TX Addr: ") + str(tx_addr)))) 113 114 115def loop(): 116 global \ 117 label_title, \ 118 label_tx_addr, \ 119 label_tx_data, \ 120 label_rx_addr, \ 121 label_rx_data, \ 122 ir, \ 123 stackchan, \ 124 ir_data, \ 125 ir_addr, \ 126 tx_data, \ 127 ir_tx, \ 128 tx_addr 129 M5.update() 130 if ir_tx: 131 ir_tx = False 132 133 134if __name__ == "__main__": 135 try: 136 setup() 137 while True: 138 loop() 139 except (Exception, KeyboardInterrupt) as e: 140 try: 141 from utility import print_error_msg 142 143 print_error_msg(e) 144 except ImportError: 145 print("please update to latest firmware")
Example output:
None
API
StackChan
- class hardware.stackchan.StackChan
StackChan board driver: SCS serial servos on UART, RGB and servo power on M5IOE1, Si12T touch, INA226 (battery bus), and onboard NFC (
ST25R3916) asunit.nfc.NFCUnit.The class is a singleton; always construct with the same
i2canduartids.After init, the instance exposes
nfc(aunit.nfc.NFCUnit—see NFC Unit for the complete API),touch,i2c, and low-levelservo(Scsclinstance) for advanced use.Module constants include
SERVO_ID_X(1),SERVO_ID_Y(2) and related limits—also available as class attributes onStackChan.UiFlow2 Code Block:

MicroPython Code Block:
from hardware.stackchan import StackChan, SERVO_ID_X, SERVO_ID_Y sc = StackChan(i2c=1, uart=1)
- set_servo_zero()
Save logical zero for both axes into NVS (namespace
servo, keyszero_pos_1/zero_pos_2).UiFlow2 Code Block:
MicroPython Code Block:
sc.set_servo_zero()
- set_servo_power(enable=True)
Enable or disable servo rail power via the IO expander.
- Parameters:
enable (bool) – Power on or off.
UiFlow2 Code Block:

MicroPython Code Block:
sc.set_servo_power(True)
- set_servo_torque(servo_id, enable=True)
Enable or disable torque on one servo.
UiFlow2 Code Block:

MicroPython Code Block:
sc.set_servo_torque(SERVO_ID_X, True)
- set_servo_angle(servo_id, angle_deg, time_ms=10, speed=0)
Move the given servo to
angle_deg(degrees). Use about -135°~135° for the X axis (SERVO_ID_X/ pan) and 0°~90° for the Y axis (SERVO_ID_Y/ tilt).- Parameters:
servo_id (int) –
SERVO_ID_XorSERVO_ID_Y.angle_deg (float) – Target angle in degrees (-135~135 for X, 0~90 for Y).
time_ms (int) – Move time (ms) passed to the controller;
0means the time parameter does not take effect.speed (int) – User speed 0~100 (mapped to the bus);
0means the speed parameter does not take effect.
UiFlow2 Code Block:


MicroPython Code Block:
sc.set_servo_angle(SERVO_ID_X, 0.0, 500, 0) sc.set_servo_angle(SERVO_ID_X, 0.0, 0, 50)
- get_servo_angle(servo_id)
Read the servo angle in degrees.
- Parameters:
servo_id (int) –
SERVO_ID_XorSERVO_ID_Y.- Returns:
Angle in degrees, or
Noneif the read failed.
UiFlow2 Code Block:

MicroPython Code Block:
deg = sc.get_servo_angle(SERVO_ID_X)
- set_servo_x_pwm(value)
Run the X servo in PWM mode for continuous rotation. User range is -100~100; the sign selects rotation direction, and the magnitude sets drive strength.
- Parameters:
value (int) – Signed PWM strength (clamped). Positive and negative values rotate in opposite directions;
0stops output.
UiFlow2 Code Block:

MicroPython Code Block:
sc.set_servo_x_pwm(50)
- set_rgb_color(*args)
Set RGB LEDs on the strip.
One argument: fill all LEDs with
color.Two arguments:
strip(0or1) andcolorfor that logical strip.Three arguments:
strip,index,colorfor a single LED (strip1index order matches the driver).
- Returns:
Trueon success where applicable.
UiFlow2 Code Block:



MicroPython Code Block:
sc.set_rgb_color(0x00FF00) sc.set_rgb_color(0, 0x0000FF) sc.set_rgb_color(0, 0, 0xFF0000)
- get_rgb_color(strip, index)
Get RGB color of a single LED.
UiFlow2 Code Block:

MicroPython Code Block:
r, g, b = sc.get_rgb_color(0, 0)
- get_touch(index=None)
Read touch state (three logical slots).
- Parameters:
index (int) – If
None, return a list of three levels; if0,1, or2, return that slot’s level.- Returns:
OUTPUT_NONE…OUTPUT_HIGHstyle values, orNoneon failure.
UiFlow2 Code Block:


MicroPython Code Block:
tp = sc.get_touch() one = sc.get_touch(0)
- get_battery_voltage()
Bus voltage from the INA226 (volts).
- Returns:
floatorNoneif unavailable.
UiFlow2 Code Block:

MicroPython Code Block:
v = sc.get_battery_voltage()
- get_battery_current()
Current from the INA226 (A).
- Returns:
floatorNone.
UiFlow2 Code Block:

MicroPython Code Block:
a = sc.get_battery_current()
- get_battery_power()
Power from the INA226 (W), when both voltage and current are valid.
- Returns:
floatorNone.
UiFlow2 Code Block:

MicroPython Code Block:
p = sc.get_battery_power()