LoRa868 Cap
Cap LoRa868 is a high-performance LoRa communication and GNSS global navigation expansion module designed for the Cardputer-Adv.
Support the following products:

UiFlow2 Example
Sender
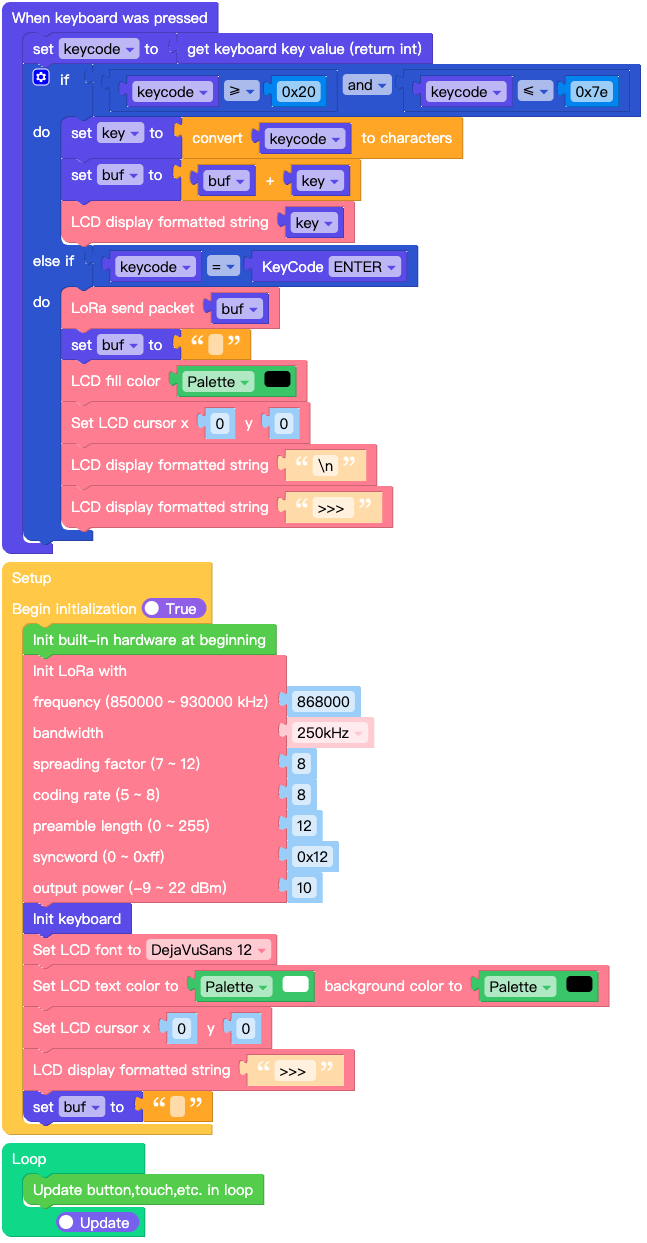
Open the cardputer_adv_lora868_cap_sender_example.m5f2 project in UiFlow2.
Use the keyboard to enter the text you want to send and press ENTER to send it.
UiFlow2 Code Block:
Example output:
None
Receiver
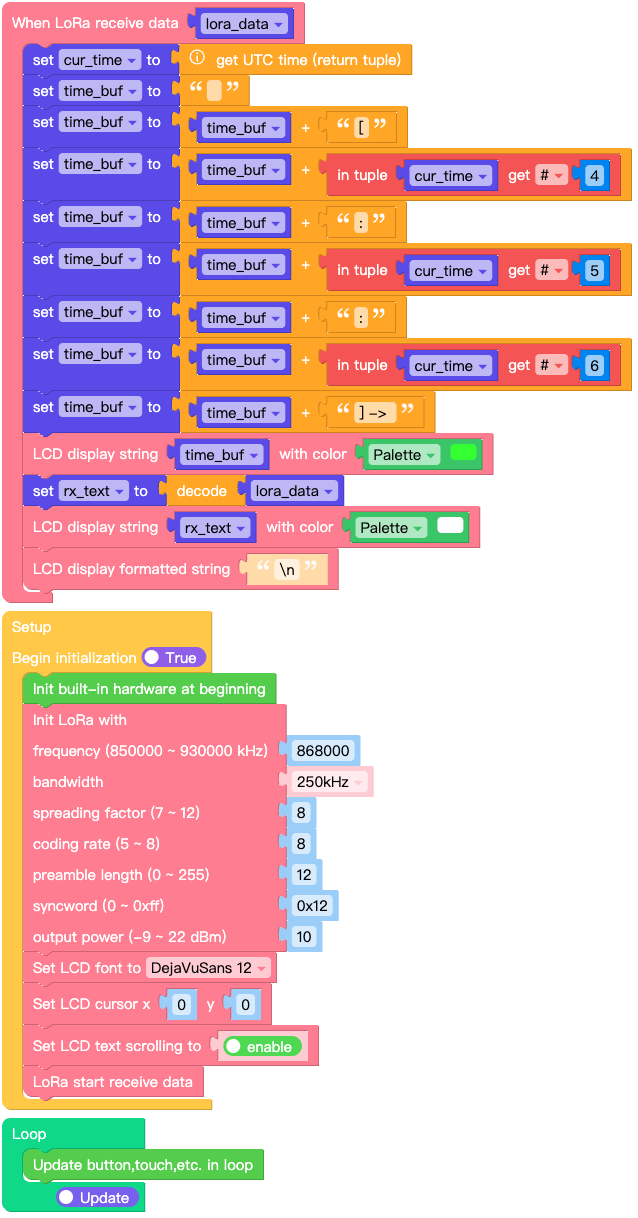
Open the cardputer_adv_lora868_cap_receiver_example.m5f2 project in UiFlow2.
This example receives and displays data.
UiFlow2 Code Block:
Example output:
None
GPS Usage
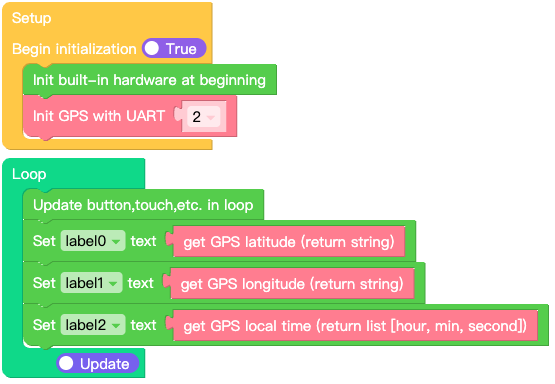
Open the cardputer_adv_lora868_cap_gps_example.m5f2 project in UiFlow2.
This example demonstrates how to use the GPS functionality of the LoRa868 Cap.
UiFlow2 Code Block:
Example output:
None
MicroPython Example
Sender
Use the keyboard to enter the text you want to send and press ENTER to send it.
MicroPython Code Block:
1# SPDX-FileCopyrightText: 2025 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8from hardware import MatrixKeyboard 9from cap import LoRa868Cap 10from unit import KeyCode 11 12 13kb = None 14cap_lora868 = None 15 16 17keycode = None 18key = None 19buf = None 20 21 22def kb_pressed_event(kb_0): 23 global kb, cap_lora868, keycode, key, buf 24 keycode = kb.get_key() 25 if keycode >= 0x20 and keycode <= 0x7E: 26 key = chr(keycode) 27 buf = str(buf) + str(key) 28 M5.Lcd.printf(key) 29 elif keycode == (KeyCode.KEYCODE_ENTER): 30 cap_lora868.send(buf, None) 31 buf = "" 32 M5.Lcd.fillScreen(0x000000) 33 M5.Lcd.setCursor(0, 0) 34 M5.Lcd.printf("\n") 35 M5.Lcd.printf(">>> ") 36 37 38def setup(): 39 global kb, cap_lora868, keycode, key, buf 40 41 M5.begin() 42 Widgets.fillScreen(0x000000) 43 44 cap_lora868 = LoRa868Cap( 45 freq_khz=868000, 46 bw="250", 47 sf=8, 48 coding_rate=8, 49 preamble_len=12, 50 syncword=0x12, 51 output_power=10, 52 ) 53 kb = MatrixKeyboard() 54 kb.set_callback(kb_pressed_event) 55 M5.Lcd.setFont(Widgets.FONTS.DejaVu12) 56 M5.Lcd.setTextColor(0xFFFFFF, 0x000000) 57 M5.Lcd.setCursor(0, 0) 58 M5.Lcd.printf(">>> ") 59 buf = "" 60 61 62def loop(): 63 global kb, cap_lora868, keycode, key, buf 64 M5.update() 65 66 67if __name__ == "__main__": 68 try: 69 setup() 70 while True: 71 loop() 72 except (Exception, KeyboardInterrupt) as e: 73 try: 74 from utility import print_error_msg 75 76 print_error_msg(e) 77 except ImportError: 78 print("please update to latest firmware")
Example output:
None
Receiver
This example receives and displays data.
MicroPython Code Block:
1# SPDX-FileCopyrightText: 2025 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8import time 9from cap import LoRa868Cap 10 11 12cap_lora868 = None 13 14 15lora_data = None 16cur_time = None 17time_buf = None 18rx_text = None 19 20 21def cap_lora868_receive_event(received_data): 22 global cap_lora868, lora_data, cur_time, time_buf, rx_text 23 lora_data = received_data 24 cur_time = time.gmtime() 25 time_buf = "" 26 time_buf = str(time_buf) + str("[") 27 time_buf = str(time_buf) + str((cur_time[3])) 28 time_buf = str(time_buf) + str(":") 29 time_buf = str(time_buf) + str((cur_time[4])) 30 time_buf = str(time_buf) + str(":") 31 time_buf = str(time_buf) + str((cur_time[5])) 32 time_buf = str(time_buf) + str("] -> ") 33 M5.Lcd.print(time_buf, 0x33FF33) 34 rx_text = lora_data.decode() 35 M5.Lcd.print(rx_text, 0xFFFFFF) 36 M5.Lcd.printf("\n") 37 38 39def setup(): 40 global cap_lora868, lora_data, cur_time, time_buf, rx_text 41 42 M5.begin() 43 Widgets.fillScreen(0x000000) 44 45 cap_lora868 = LoRa868Cap( 46 freq_khz=868000, 47 bw="250", 48 sf=8, 49 coding_rate=8, 50 preamble_len=12, 51 syncword=0x12, 52 output_power=10, 53 ) 54 cap_lora868.set_irq_callback(cap_lora868_receive_event) 55 M5.Lcd.setFont(Widgets.FONTS.DejaVu12) 56 M5.Lcd.setCursor(0, 0) 57 M5.Lcd.setTextScroll(True) 58 cap_lora868.start_recv() 59 60 61def loop(): 62 global cap_lora868, lora_data, cur_time, time_buf, rx_text 63 M5.update() 64 65 66if __name__ == "__main__": 67 try: 68 setup() 69 while True: 70 loop() 71 except (Exception, KeyboardInterrupt) as e: 72 try: 73 from utility import print_error_msg 74 75 print_error_msg(e) 76 except ImportError: 77 print("please update to latest firmware")
Example output:
None
GPS Usage
This example demonstrates how to use the GPS functionality of the LoRa868 Cap.
MicroPython Code Block:
1# SPDX-FileCopyrightText: 2025 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8from cap import GPSCap 9 10 11label0 = None 12label1 = None 13label2 = None 14cap_lora868 = None 15 16 17def setup(): 18 global label0, label1, label2, cap_lora868 19 20 M5.begin() 21 Widgets.fillScreen(0x000000) 22 label0 = Widgets.Label("label0", 11, 16, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 23 label1 = Widgets.Label("label1", 11, 46, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 24 label2 = Widgets.Label("label2", 10, 77, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 25 26 cap_lora868 = GPSCap(id=2) 27 28 29def loop(): 30 global label0, label1, label2, cap_lora868 31 M5.update() 32 label0.setText(str(cap_lora868.get_latitude())) 33 label1.setText(str(cap_lora868.get_longitude())) 34 label2.setText(str(cap_lora868.get_gps_time())) 35 36 37if __name__ == "__main__": 38 try: 39 setup() 40 while True: 41 loop() 42 except (Exception, KeyboardInterrupt) as e: 43 try: 44 from utility import print_error_msg 45 46 print_error_msg(e) 47 except ImportError: 48 print("please update to latest firmware")
Example output:
None
API
class LoRa868Cap
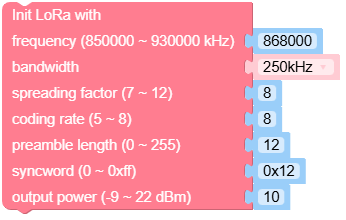
- class cap.lora868.LoRa868Cap(freq_khz=868000, bw='250', sf=8, coding_rate=8, preamble_len=12, syncword=18, output_power=10)
Bases:
objectCreate a LoRa868Cap object.
- Parameters:
pin_rst (int) – (RST) Reset pin number.
pin_cs (int) – (NSS) Chip select pin number.
pin_irq (int) – (IRQ) Interrupt pin number.
pin_busy (int) – (BUSY) Busy pin number.
freq_khz (int) – LoRa RF frequency in KHz, with a range of 850000 KHz to 930000 KHz.
bw (str) –
Bandwidth, options include:
"7.8": 7.8 KHz"10.4": 10.4 KHz"15.6": 15.6 KHz"20.8": 20.8 KHz"31.25": 31.25 KHz"41.7": 41.7 KHz"62.5": 62.5 KHz"125": 125 KHz"250": 250 KHz"500": 500 KHz
sf (int) – Spreading factor, range from 7 to 12. Higher spreading factors allow reception of weaker signals but with slower data rates.
coding_rate (int) – Forward Error Correction (FEC) coding rate expressed as 4/N, with a range from 5 to 8.
preamble_len (int) – Length of the preamble sequence in symbols, range from 0 to 255.
syncword (int) – Sync word to mark the start of the data frame, default is 0x12.
output_power (int) – Output power in dBm, range from -9 to 22.
UiFlow2 Code Block:
MicroPython Code Block:
from cap import LoRa868Cap cap_lora868_0 = LoRa868Cap(5, 1, 10, 2, 868000, '250', 8, 8, 12, 0x12, 10)
- set_freq(freq_khz=868000)
Set frequency in kHz.
- Parameters:
freq_khz (int) – Frequency in kHz (850000 ~ 930000), default is 868000.
- Return type:
None
UiFlow2 Code Block:

MicroPython Code Block:
module_lora868v12_0.set_freq(868000)
- set_sf(sf)
Set spreading factor (SF).
- Parameters:
sf (int) – Spreading factor (7 ~ 12)
- Return type:
None
UiFlow2 Code Block:

MicroPython Code Block:
module_lora868v12_0.set_sf(7)
- set_bw(bw)
Set bandwidth.
- Parameters:
bw (str) – Bandwidth in kHz as string. Must be one of: ‘7.8’, ‘10.4’, ‘15.6’, ‘20.8’, ‘31.25’, ‘41.7’, ‘62.5’, ‘125’, ‘250’, ‘500’.
- Return type:
None
UiFlow2 Code Block:

MicroPython Code Block:
module_lora868v12_0.set_bw(bw)
- set_coding_rate(coding_rate)
Set coding rate.
- Parameters:
coding_rate (int) – Coding rate (5 ~ 8)
- Return type:
None
UiFlow2 Code Block:

MicroPython Code Block:
module_lora868v12_0.set_coding_rate(coding_rate)
- set_syncword(syncword)
Set syncword.
- Parameters:
syncword (int) – Sync word (0 ~ 0xFF)
- Return type:
None
UiFlow2 Code Block:

MicroPython Code Block:
module_lora868v12_0.set_syncword(syncword)
- set_preamble_len(preamble_len)
Set preamble length.
- Parameters:
preamble_len (int) – Preamble length, range: 0~255.
- Return type:
None
UiFlow2 Code Block:

MicroPython Code Block:
module_lora868v12_0.set_preamble_len(preamble_len)
- set_output_power(output_power)
Set output power in dBm.
- Parameters:
output_power (int) – Output power in dBm (-9 ~ 22)
- Return type:
None
UiFlow2 Code Block:

MicroPython Code Block:
module_lora868v12_0.set_output_power(output_power)
- send(packet, tx_at_ms=None)
Send data
- Parameters:
- Returns:
timestamp
- Return type:
Send a data packet and return the timestamp after the packet is sent.
UiFlow2 Code Block:
MicroPython Code Block:
module_lora868v12_0.send()
- recv(timeout_ms=None, rx_length=255, rx_packet=None)
Receive data
- Parameters:
- Returns:
Received packet instance
- Return type:
Attempt to receive a LoRa packet. Returns None if timeout occurs, or returns the received packet instance.
UiFlow2 Code Block:

MicroPython Code Block:
data = module_lora868v12_0.recv()
- start_recv()
Start receive data
This method initiates the process to begin receiving data.
UiFlow2 Code Block:
MicroPython Code Block:
module_lora868v12_0.start_recv()
- Return type:
None
- set_irq_callback(callback)
Set the interrupt callback function to be executed on IRQ.
- Parameters:
callback – The callback function to be invoked when the interrupt is triggered. The callback should not take any arguments and should return nothing.
- Return type:
None
UiFlow2 Code Block:

MicroPython Code Block:
module_lora868v12_0.set_irq_callback()
- standby()
Set module to standby mode.
Puts the LoRa module into standby mode, consuming less power.
UiFlow2 Code Block:

MicroPython Code Block:
module_lora868v12_0.standby()
- Return type:
None
- sleep()
Set module to sleep mode.
Reduces the power consumption by putting the module into deep sleep mode.
UiFlow2 Code Block:
MicroPython Code Block:
module_lora868v12_0.sleep()
- Return type:
None

class GPSCap
- class cap.lora868.GPSCap(id=1, rx=None, tx=None, pps=-1)
Bases:
ATGM336HInitialize the GPSCap with a specific UART id and port for communication.
- Parameters:
id (int) – The UART ID for communication with the GPS module. It can be 0, 1, or 2.
rx (int) – The RX pin for UART communication. If None, uses default pin from board definition.
tx (int) – The TX pin for UART communication. If None, uses default pin from board definition.
pps (int) – The PPS (Pulse Per Second) pin, used for high-precision time synchronization. Default is -1 (not used).
UiFlow2 Code Block:
MicroPython Code Block:
from cap import GPSCap gps_0 = GPSCap(id=2)