Chain PIR
PIRChain 是链式总线上 PIR(被动红外)传感器设备的辅助类。它提供了读取红外感应值、配置触发延迟以及监控 PIR 触发事件的方法。
支持以下产品:

UiFlow2 应用示例
PIR 运动检测
在 UiFlow2 中打开 m5core_chain_pir_basic_example.m5f2 项目。
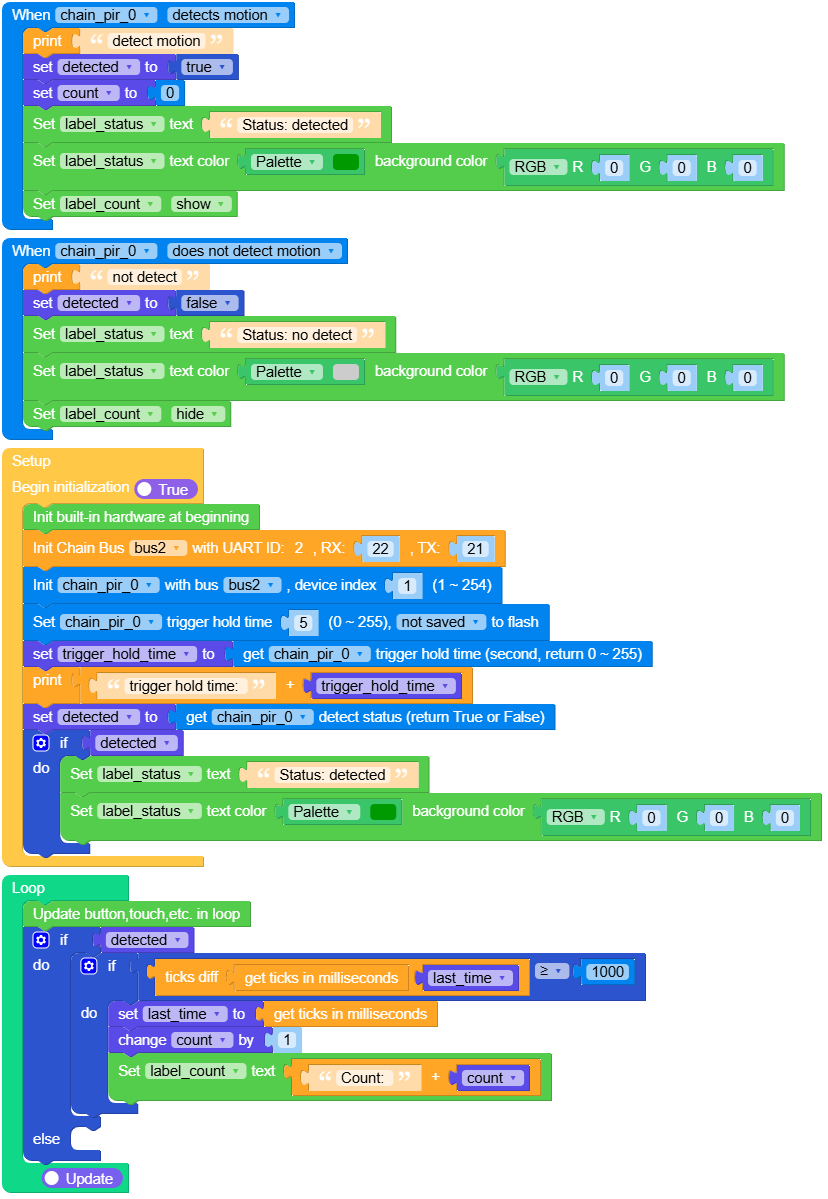
本示例演示如何使用 Chain PIR 传感器的触发回调来更新屏幕上的运动状态。它启用触发自动发送、配置触发保持时间,并在运动激活时统计检测持续时间。
UiFlow2 代码块:
示例输出:
None
MicroPython 应用示例
PIR 运动检测
本示例演示如何使用 Chain PIR 传感器的触发回调来更新屏幕上的运动状态。它启用触发自动发送、配置触发保持时间,并在运动激活时统计检测持续时间。
MicroPython 代码块:
1# SPDX-FileCopyrightText: 2026 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8from chain import PIRChain 9from chain import ChainBus 10import time 11 12 13title0 = None 14label_status = None 15label_count = None 16bus2 = None 17chain_pir_0 = None 18detected = None 19count = None 20last_time = None 21trigger_hold_time = None 22 23 24def chain_pir_0_motion_detected_event(args): 25 global \ 26 title0, \ 27 label_status, \ 28 label_count, \ 29 bus2, \ 30 chain_pir_0, \ 31 detected, \ 32 count, \ 33 last_time, \ 34 trigger_hold_time 35 print("detect motion") 36 detected = True 37 count = 0 38 label_status.setText(str("Status: detected")) 39 label_status.setColor(0x009900, 0x000000) 40 label_count.setVisible(True) 41 42 43def chain_pir_0_motion_ended_event(args): 44 global \ 45 title0, \ 46 label_status, \ 47 label_count, \ 48 bus2, \ 49 chain_pir_0, \ 50 detected, \ 51 count, \ 52 last_time, \ 53 trigger_hold_time 54 print("not detect") 55 detected = False 56 label_status.setText(str("Status: no detect")) 57 label_status.setColor(0xCCCCCC, 0x000000) 58 label_count.setVisible(False) 59 60 61def setup(): 62 global \ 63 title0, \ 64 label_status, \ 65 label_count, \ 66 bus2, \ 67 chain_pir_0, \ 68 detected, \ 69 count, \ 70 last_time, \ 71 trigger_hold_time 72 73 M5.begin() 74 Widgets.setRotation(1) 75 Widgets.fillScreen(0x000000) 76 title0 = Widgets.Title("Chain PIR Example", 3, 0xFFFFFF, 0x0000FF, Widgets.FONTS.DejaVu24) 77 label_status = Widgets.Label( 78 "Status: --", 20, 70, 1.0, 0xFFFFFF, 0x000000, Widgets.FONTS.DejaVu24 79 ) 80 label_count = Widgets.Label( 81 "Count: --", 20, 165, 1.0, 0xFFFFFF, 0x000000, Widgets.FONTS.DejaVu24 82 ) 83 84 bus2 = ChainBus(2, tx=21, rx=22) 85 chain_pir_0 = PIRChain(bus2, 1) 86 chain_pir_0.set_trigger_callback( 87 PIRChain.TRIGGER_MOTION_DETECTED, chain_pir_0_motion_detected_event 88 ) 89 chain_pir_0.set_trigger_callback(PIRChain.TRIGGER_MOTION_ENDED, chain_pir_0_motion_ended_event) 90 chain_pir_0.set_trigger(True) 91 chain_pir_0.set_trigger_hold_time(5, save=False) 92 trigger_hold_time = chain_pir_0.get_trigger_hold_time() 93 print((str("trigger hold time: ") + str(trigger_hold_time))) 94 detected = chain_pir_0.get_detect_status() 95 if detected: 96 label_status.setText(str("Status: detected")) 97 label_status.setColor(0x009900, 0x000000) 98 99 100def loop(): 101 global \ 102 title0, \ 103 label_status, \ 104 label_count, \ 105 bus2, \ 106 chain_pir_0, \ 107 detected, \ 108 count, \ 109 last_time, \ 110 trigger_hold_time 111 M5.update() 112 if detected: 113 if (time.ticks_diff((time.ticks_ms()), last_time)) >= 1000: 114 last_time = time.ticks_ms() 115 count = (count if isinstance(count, (int, float)) else 0) + 1 116 label_count.setText(str((str("Count: ") + str(count)))) 117 else: 118 pass 119 120 121if __name__ == "__main__": 122 try: 123 setup() 124 while True: 125 loop() 126 except (Exception, KeyboardInterrupt) as e: 127 try: 128 bus2.deinit() 129 from utility import print_error_msg 130 131 print_error_msg(e) 132 except ImportError: 133 print("please update to latest firmware")
示例输出:
None
API 参考
PIRChain
- class chain.pir.PIRChain(bus, device_id)
基类:
KeyChain用于通过链式总线与 PIR(被动红外)传感器设备交互的 PIR Chain 类。
UiFlow2 代码块:

MicroPython 代码块:
from chain import ChainBus from chain import PIRChain bus2 = ChainBus(2, tx=21, rx=22) chain_pir_0 = PIRChain(bus2, 1)
其他按钮和一些通用方法,请参考
ChainKey类。- get_detect_status()
获取运动检测状态。
- 返回:
运动检测状态。True 表示检测到运动,False 表示运动结束。失败时返回 False。
- 返回类型:
UiFlow2 代码块:

MicroPython 代码块:
status = chain_pir_0.get_detect_status()
- set_trigger(enable)
启用或禁用 PIR 检测报告。
UiFlow2 代码块:

MicroPython 代码块:
success = chain_pir_0.set_trigger(True)
- get_trigger()
获取是否启用 PIR 检测报告。
- 返回:
启用 PIR 检测报告返回 True,禁用返回 False。失败时返回 False。
- 返回类型:
UiFlow2 代码块:

MicroPython 代码块:
enabled = chain_pir_0.get_trigger()
- set_trigger_hold_time(seconds, save=False)
设置触发运动结束状态前的保持时间。
- 参数:
- 返回:
操作成功返回 True,否则返回 False。
- 返回类型:
UiFlow2 代码块:

MicroPython 代码块:
success = chain_pir_0.set_trigger_hold_time(5, False)
- get_trigger_hold_time()
获取触发运动结束状态前的保持时间。
- 返回:
保持时间(秒),失败时返回 None。
- 返回类型:
UiFlow2 代码块:

MicroPython 代码块:
hold_time = chain_pir_0.get_trigger_hold_time()
- set_trigger_callback(trigger_type, callback)
设置 PIR 运动检测事件的回调。
- 参数:
trigger_type (int) – 要监听的触发类型。使用
PIRChain.TRIGGER_MOTION_DETECTED(1) 表示检测到运动,或PIRChain.TRIGGER_MOTION_ENDED(0) 表示运动结束。callback – 当 PIR 运动检测状态变化时将被调用的回调函数。
- 返回类型:
None
备注
在回调函数中不能调用链式相关方法。
UiFlow2 代码块:
MicroPython 代码块:
def motion_detected_callback(args): print("Motion detected") def motion_ended_callback(args): print("Motion ended") # Listen for motion detected only chain_pir_0.set_trigger_callback(PIRChain.TRIGGER_MOTION_DETECTED, motion_detected_callback) # Listen for motion ended only chain_pir_0.set_trigger_callback(PIRChain.TRIGGER_MOTION_ENDED, motion_ended_callback)