LoRa868 Cap
Cap LoRa868 是一款专为 Cardputer-Adv 设计的高性能 LoRa 通信和 GNSS 全球导航扩展模块。
支持以下产品:

UIFLOW2 应用示例
发送端
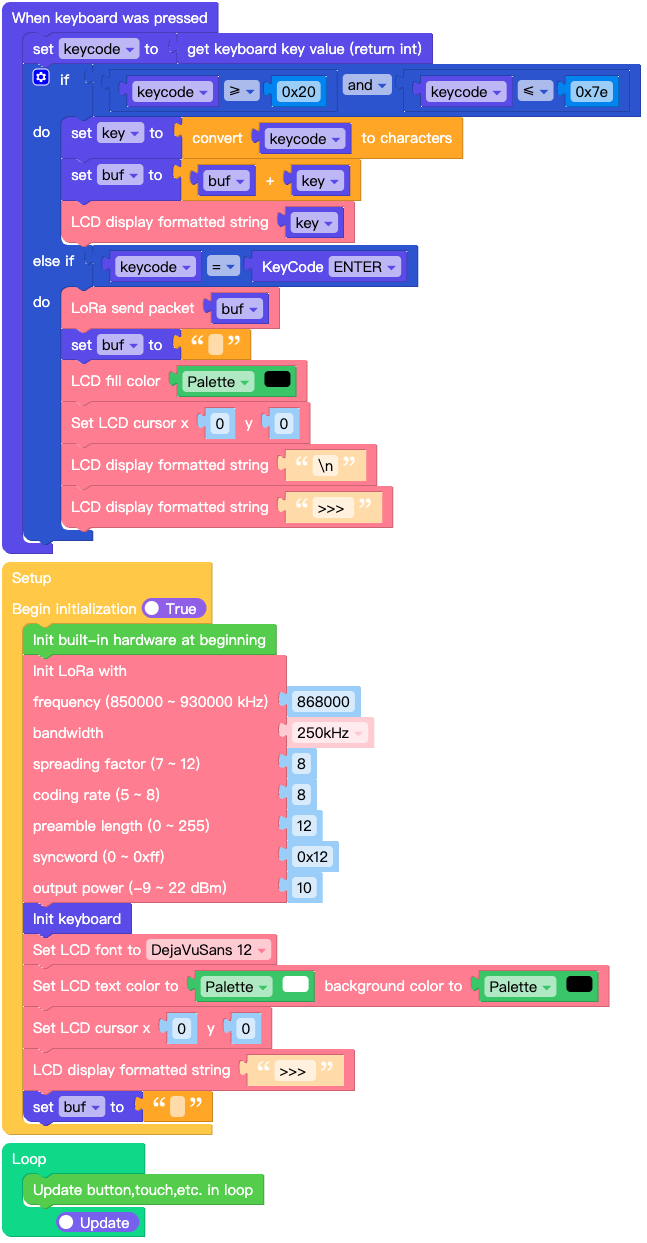
在 UiFlow2 中打开 cardputer_adv_lora868_cap_sender_example.m5f2 项目。
使用键盘输入要发送的文本,然后按 ENTER 键发送。
UiFlow2 代码块:
示例输出:
None
接收端
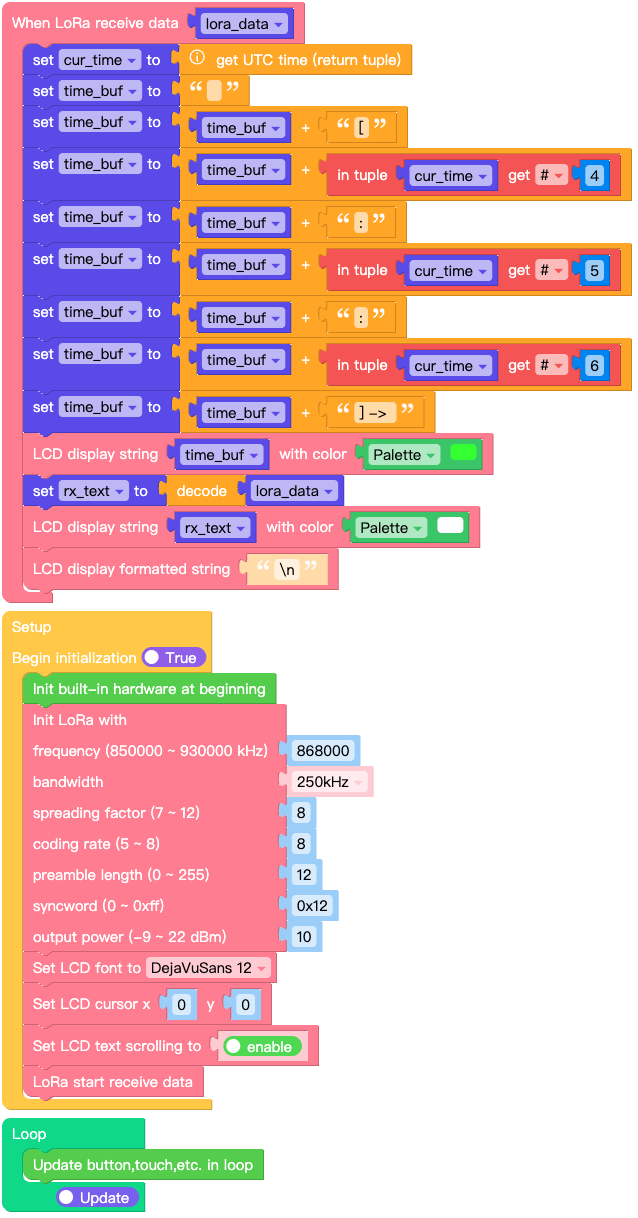
在 UiFlow2 中打开 cardputer_adv_lora868_cap_receiver_example.m5f2 项目。
此示例接收并显示数据。
UiFlow2 代码块:
示例输出:
None
GPS 使用
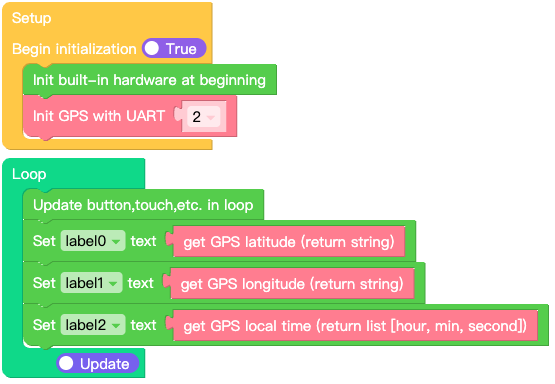
在 UiFlow2 中打开 cardputer_adv_lora868_cap_gps_example.m5f2 项目。
此示例演示如何使用 LoRa868 Cap 的 GPS 功能。
UiFlow2 代码块:
示例输出:
None
MicroPython 示例
发送端
使用键盘输入要发送的文本,然后按 ENTER 键发送。
MicroPython 代码块:
1# SPDX-FileCopyrightText: 2025 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8from hardware import MatrixKeyboard 9from cap import LoRa868Cap 10from unit import KeyCode 11 12 13kb = None 14cap_lora868 = None 15 16 17keycode = None 18key = None 19buf = None 20 21 22def kb_pressed_event(kb_0): 23 global kb, cap_lora868, keycode, key, buf 24 keycode = kb.get_key() 25 if keycode >= 0x20 and keycode <= 0x7E: 26 key = chr(keycode) 27 buf = str(buf) + str(key) 28 M5.Lcd.printf(key) 29 elif keycode == (KeyCode.KEYCODE_ENTER): 30 cap_lora868.send(buf, None) 31 buf = "" 32 M5.Lcd.fillScreen(0x000000) 33 M5.Lcd.setCursor(0, 0) 34 M5.Lcd.printf("\n") 35 M5.Lcd.printf(">>> ") 36 37 38def setup(): 39 global kb, cap_lora868, keycode, key, buf 40 41 M5.begin() 42 Widgets.fillScreen(0x000000) 43 44 cap_lora868 = LoRa868Cap( 45 freq_khz=868000, 46 bw="250", 47 sf=8, 48 coding_rate=8, 49 preamble_len=12, 50 syncword=0x12, 51 output_power=10, 52 ) 53 kb = MatrixKeyboard() 54 kb.set_callback(kb_pressed_event) 55 M5.Lcd.setFont(Widgets.FONTS.DejaVu12) 56 M5.Lcd.setTextColor(0xFFFFFF, 0x000000) 57 M5.Lcd.setCursor(0, 0) 58 M5.Lcd.printf(">>> ") 59 buf = "" 60 61 62def loop(): 63 global kb, cap_lora868, keycode, key, buf 64 M5.update() 65 66 67if __name__ == "__main__": 68 try: 69 setup() 70 while True: 71 loop() 72 except (Exception, KeyboardInterrupt) as e: 73 try: 74 from utility import print_error_msg 75 76 print_error_msg(e) 77 except ImportError: 78 print("please update to latest firmware")
示例输出:
None
接收端
此示例接收并显示数据。
MicroPython 代码块:
1# SPDX-FileCopyrightText: 2025 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8import time 9from cap import LoRa868Cap 10 11 12cap_lora868 = None 13 14 15lora_data = None 16cur_time = None 17time_buf = None 18rx_text = None 19 20 21def cap_lora868_receive_event(received_data): 22 global cap_lora868, lora_data, cur_time, time_buf, rx_text 23 lora_data = received_data 24 cur_time = time.gmtime() 25 time_buf = "" 26 time_buf = str(time_buf) + str("[") 27 time_buf = str(time_buf) + str((cur_time[3])) 28 time_buf = str(time_buf) + str(":") 29 time_buf = str(time_buf) + str((cur_time[4])) 30 time_buf = str(time_buf) + str(":") 31 time_buf = str(time_buf) + str((cur_time[5])) 32 time_buf = str(time_buf) + str("] -> ") 33 M5.Lcd.print(time_buf, 0x33FF33) 34 rx_text = lora_data.decode() 35 M5.Lcd.print(rx_text, 0xFFFFFF) 36 M5.Lcd.printf("\n") 37 38 39def setup(): 40 global cap_lora868, lora_data, cur_time, time_buf, rx_text 41 42 M5.begin() 43 Widgets.fillScreen(0x000000) 44 45 cap_lora868 = LoRa868Cap( 46 freq_khz=868000, 47 bw="250", 48 sf=8, 49 coding_rate=8, 50 preamble_len=12, 51 syncword=0x12, 52 output_power=10, 53 ) 54 cap_lora868.set_irq_callback(cap_lora868_receive_event) 55 M5.Lcd.setFont(Widgets.FONTS.DejaVu12) 56 M5.Lcd.setCursor(0, 0) 57 M5.Lcd.setTextScroll(True) 58 cap_lora868.start_recv() 59 60 61def loop(): 62 global cap_lora868, lora_data, cur_time, time_buf, rx_text 63 M5.update() 64 65 66if __name__ == "__main__": 67 try: 68 setup() 69 while True: 70 loop() 71 except (Exception, KeyboardInterrupt) as e: 72 try: 73 from utility import print_error_msg 74 75 print_error_msg(e) 76 except ImportError: 77 print("please update to latest firmware")
示例输出:
None
GPS 使用
此示例演示如何使用 LoRa868 Cap 的 GPS 功能。
MicroPython 代码块:
1# SPDX-FileCopyrightText: 2025 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8from cap import GPSCap 9 10 11label0 = None 12label1 = None 13label2 = None 14cap_lora868 = None 15 16 17def setup(): 18 global label0, label1, label2, cap_lora868 19 20 M5.begin() 21 Widgets.fillScreen(0x000000) 22 label0 = Widgets.Label("label0", 11, 16, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 23 label1 = Widgets.Label("label1", 11, 46, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 24 label2 = Widgets.Label("label2", 10, 77, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 25 26 cap_lora868 = GPSCap(id=2) 27 28 29def loop(): 30 global label0, label1, label2, cap_lora868 31 M5.update() 32 label0.setText(str(cap_lora868.get_latitude())) 33 label1.setText(str(cap_lora868.get_longitude())) 34 label2.setText(str(cap_lora868.get_gps_time())) 35 36 37if __name__ == "__main__": 38 try: 39 setup() 40 while True: 41 loop() 42 except (Exception, KeyboardInterrupt) as e: 43 try: 44 from utility import print_error_msg 45 46 print_error_msg(e) 47 except ImportError: 48 print("please update to latest firmware")
示例输出:
None
API参考
class LoRa868Cap
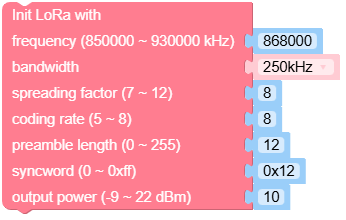
- class cap.lora868.LoRa868Cap(freq_khz=868000, bw='250', sf=8, coding_rate=8, preamble_len=12, syncword=18, output_power=10)
基类:
object创建一个 LoRa868Cap 对象。
- 参数:
pin_rst (int) – (RST) 复位引脚号。
pin_cs (int) – (NSS) 片选引脚号。
pin_irq (int) – (IRQ) 中断引脚号。
pin_busy (int) – (BUSY) 忙碌引脚号。
freq_khz (int) – LoRa 射频频率,单位为 KHz,范围为 850000 KHz 至 930000 KHz。
bw (str) – 带宽,选项包括: -
"7.8": 7.8 KHz -"10.4": 10.4 KHz -"15.6": 15.6 KHz -"20.8": 20.8 KHz -"31.25": 31.25 KHz -"41.7": 41.7 KHz -"62.5": 62.5 KHz -"125": 125 KHz -"250": 250 KHz -"500": 500 KHzsf (int) – 扩频因子,范围从 7 到 12。较高的扩频因子可以接收到更弱的信号,但数据速率较慢。
coding_rate (int) – 前向纠错 (FEC) 编码率,表示为 4/N,范围从 5 到 8。
preamble_len (int) – 前导码序列的长度,以符号为单位,范围从 0 到 255。
syncword (int) – 用于标记数据帧开始的同步字,默认为 0x12。
output_power (int) – 输出功率,单位为 dBm,范围从 -9 到 22。
UiFlow2 代码块:
MicroPython 代码块:
from cap import LoRa868Cap cap_lora868_0 = LoRa868Cap(5, 1, 10, 2, 868000, '250', 8, 8, 12, 0x12, 10)
- set_freq(freq_khz=868000)
设置频率,单位为 kHz。
- 参数:
freq_khz (int) – 频率,单位为 kHz (850000 ~ 930000),默认为 868000。
- 返回类型:
None
UiFlow2 代码块:

MicroPython 代码块:
module_lora868v12_0.set_freq(868000)
- set_sf(sf)
设置扩频因子 (SF)。
- 参数:
sf (int) – 扩频因子 (7 ~ 12)
- 返回类型:
None
UiFlow2 代码块:

MicroPython 代码块:
module_lora868v12_0.set_sf(7)
- set_bw(bw)
设置带宽。
- 参数:
bw (str) – 带宽,单位 kHz,字符串格式。必须是 ‘7.8’、’10.4’、’15.6’、’20.8’、’31.25’、’41.7’、’62.5’、’125’、’250’、’500’ 中的一个。
- 返回类型:
None
UiFlow2 代码块:

MicroPython 代码块:
module_lora868v12_0.set_bw(bw)
- set_coding_rate(coding_rate)
设置编码率。
- 参数:
coding_rate (int) – 编码率 (5 ~ 8)
- 返回类型:
None
UiFlow2 代码块:

MicroPython 代码块:
module_lora868v12_0.set_coding_rate(coding_rate)
- set_syncword(syncword)
设置同步字。
- 参数:
syncword (int) – 同步字 (0 ~ 0xFF)
- 返回类型:
None
UiFlow2 代码块:

MicroPython 代码块:
module_lora868v12_0.set_syncword(syncword)
- set_preamble_len(preamble_len)
设置前导码长度。
- 参数:
preamble_len (int) – 前导码长度,范围:0~255。
- 返回类型:
None
UiFlow2 代码块:

MicroPython 代码块:
module_lora868v12_0.set_preamble_len(preamble_len)
- set_output_power(output_power)
设置输出功率,单位 dBm。
- 参数:
output_power (int) – 输出功率,单位 dBm (-9 ~ 22)
- 返回类型:
None
UiFlow2 代码块:

MicroPython 代码块:
module_lora868v12_0.set_output_power(output_power)
- send(packet, tx_at_ms=None)
发送数据
- 参数:
- 返回:
时间戳
- 返回类型:
发送一个数据包,并在数据包发送后返回时间戳。
UiFlow2 代码块:
MicroPython 代码块:
module_lora868v12_0.send()
- recv(timeout_ms=None, rx_length=255, rx_packet=None)
接收数据
- 参数:
- 返回:
接收到的数据包实例
- 返回类型:
尝试接收一个 LoRa 数据包。如果超时则返回 None,否则返回接收到的数据包实例。
UiFlow2 代码块:

MicroPython 代码块:
data = module_lora868v12_0.recv()
- start_recv()
开始接收数据
该方法启动开始接收数据的过程。
UiFlow2 代码块:
MicroPython 代码块:
module_lora868v12_0.start_recv()
- 返回类型:
None
- set_irq_callback(callback)
设置在 IRQ 上执行的中断回调函数。
- 参数:
callback – 中断触发时要调用的回调函数。该回调函数不应接受任何参数,也不应返回任何内容。
- 返回类型:
None
UiFlow2 代码块:

MicroPython 代码块:
module_lora868v12_0.set_irq_callback()
- standby()
将模块设置为待机模式。
将 LoRa 模块置于待机模式,功耗更低。
UiFlow2 代码块:

MicroPython 代码块:
module_lora868v12_0.standby()
- 返回类型:
None
- sleep()
将模块设置为睡眠模式。
通过将模块置于深度睡眠模式来降低功耗。
UiFlow2 代码块:
MicroPython 代码块:
module_lora868v12_0.sleep()
- 返回类型:
None