PDM Unit
这是 PDM 单元的驱动程序库,提供了一套控制 PDM 麦克风的方法。通过 I2S 接口,该模块可记录音频数据并保存为 WAV 文件。
支持以下产品:

UiFlow2 应用示例
录音音频并播放
在 UiFlow2 中打开 pdm_cores3_example.m5f2 项目。
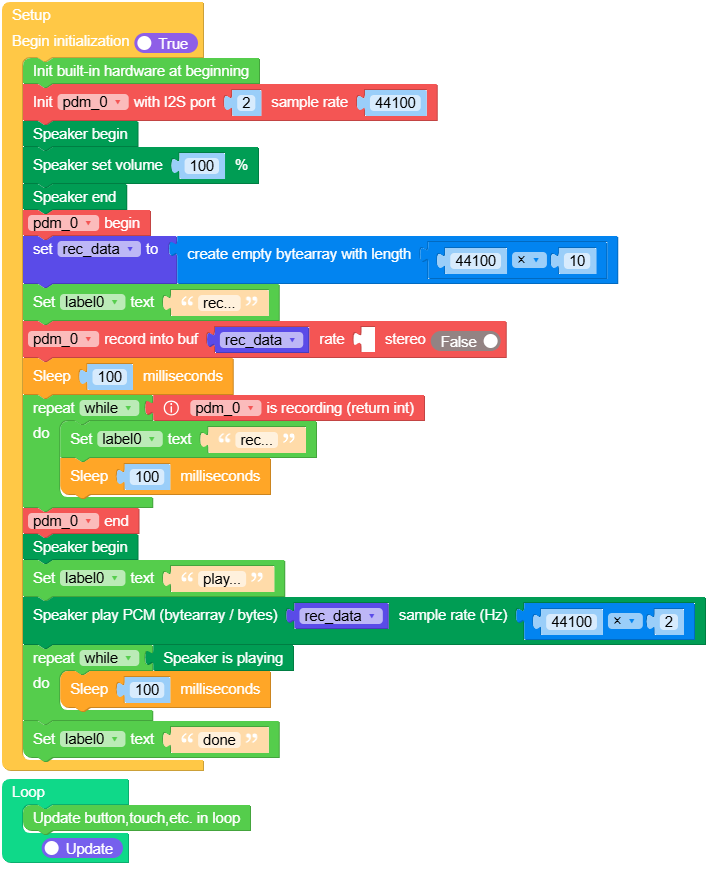
这个示例展示了录音音频并播放。
UiFlow2 代码块:
示例输出:
None
MicroPython 应用示例
录音音频并播放
这个示例展示了录音音频并播放。
MicroPython 代码块:
1# SPDX-FileCopyrightText: 2024 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8from unit import PDMUnit 9import time 10 11 12label0 = None 13title0 = None 14pdm_0 = None 15 16 17rec_data = None 18 19 20def setup(): 21 global label0, title0, pdm_0, rec_data 22 23 M5.begin() 24 Widgets.fillScreen(0x222222) 25 label0 = Widgets.Label("label0", 128, 114, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 26 title0 = Widgets.Title("PDMUnit CoreS3 Example", 3, 0xFFFFFF, 0x0000FF, Widgets.FONTS.DejaVu18) 27 28 pdm_0 = PDMUnit((1, 2), i2s_port=2, sample_rate=44100) 29 Speaker.begin() 30 Speaker.setVolumePercentage(1) 31 Speaker.end() 32 pdm_0.begin() 33 rec_data = bytearray(44100 * 10) 34 label0.setText(str("rec...")) 35 pdm_0.record(rec_data, _, False) 36 time.sleep_ms(100) 37 while pdm_0.isRecording(): 38 label0.setText(str("rec...")) 39 time.sleep_ms(100) 40 pdm_0.end() 41 Speaker.begin() 42 label0.setText(str("play...")) 43 Speaker.playRaw(rec_data, 44100 * 2) 44 while Speaker.isPlaying(): 45 time.sleep_ms(100) 46 label0.setText(str("done")) 47 48 49def loop(): 50 global label0, title0, pdm_0, rec_data 51 M5.update() 52 53 54if __name__ == "__main__": 55 try: 56 setup() 57 while True: 58 loop() 59 except (Exception, KeyboardInterrupt) as e: 60 try: 61 from utility import print_error_msg 62 63 print_error_msg(e) 64 except ImportError: 65 print("please update to latest firmware")
示例输出:
None
API
PDMUnit
- class unit.pdm.PDMUnit(*args, **kwargs)
基类:
objectPDM Unit class.
UiFlow2 代码块:

MicroPython 代码块:
from unit import PDMUnit pdm_0 = PDMUnit((1, 2), i2s_port=0, sample_rate=44100)
- begin()
初始化 PDM 麦克风。
- 返回:
如果初始化成功,返回 True,否则返回 False。
- 返回类型:
UiFlow2 代码块:
MicroPython 代码块:
pdm.begin()
- end()
停止 PDM 麦克风。
UiFlow2 代码块:
MicroPython 代码块:
pdm.end()
- record(buffer, sample_rate=16000, stereo=False)
将音频数据记录到提供的缓冲区中。
- 参数:
- 返回:
如果录音成功开始,返回 True,否则返回 False。
- 返回类型:
UiFlow2 代码块:

MicroPython 代码块:
rec_data = bytearray(16000 * 5) # 5 seconds buffer pdm.record(rec_data, 16000, False)
- isRecording()
检查录音是否正在进行。
- 返回:
返回记录的字节数。
0- 未录音1- 录音(队列有可用空间)2- 录音(队列已满)
- 返回类型:
UiFlow2 代码块:

MicroPython 代码块:
pdm.isRecording()
- recordWavFile(path, rate=16000, time=5, stereo=False)
直接将音频记录到 WAV 文件中。
- 参数:
- 返回:
如果录音成功,返回 True,否则返回 False。
- 返回类型:
UiFlow2 代码块:

MicroPython 代码块:
pdm.recordWavFile("/sd/test.wav", 16000, 5, False)
- config(**kwargs)
配置 PDM 麦克风参数。
- 参数:
kwargs –
配置参数
pin_data_in: 数据输入引脚
pin_ws: 字选引脚
sample_rate: 采样率
stereo: 立体声模式
over_sampling: 过采样率
noise_filter_level: 噪声过滤级别
magnification: 音频放大倍数
dma_buf_len: DMA 缓冲区长度
dma_buf_count: DMA 缓冲区计数
task_priority: 任务优先级
task_pinned_core: 指定任务运行的核心
i2s_port: I2S 端口号
UiFlow2 代码块:




MicroPython 代码块:
pdm.config( dma_buf_count=3, dma_buf_len=256, over_sampling=2, noise_filter_level=0, sample_rate=16000, pin_data_in=1, pin_ws=2, pin_bck=-1, pin_mck=-1, use_adc=False, stereo=False, magnification=1, task_priority=2, task_pinned_core=255, i2s_port=i2s_port, )