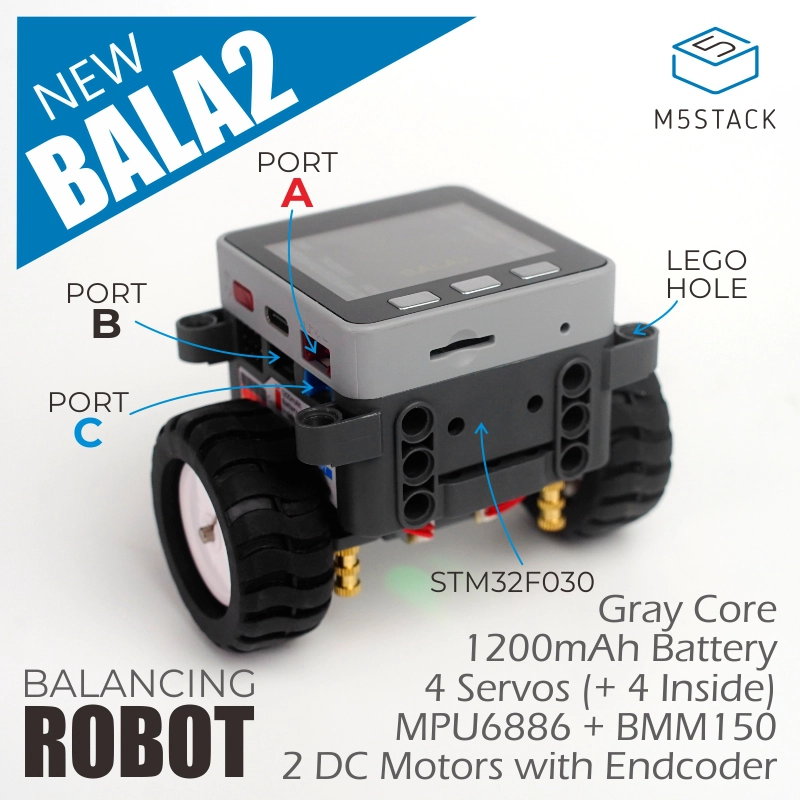
Bala2 Module
Bala2 模块是 M5Stack 堆叠模块系列的一部分。该模块通过 I2C 接口与主机通信,内置的微控制器负责电机的 PWM 控制、读取编码器计数,和输出舵机控制信号。
支持以下产品:

UiFlow2 应用示例:
舵机控制
在 UiFlow2 上打开 servo_control_example.m5f2 项目。
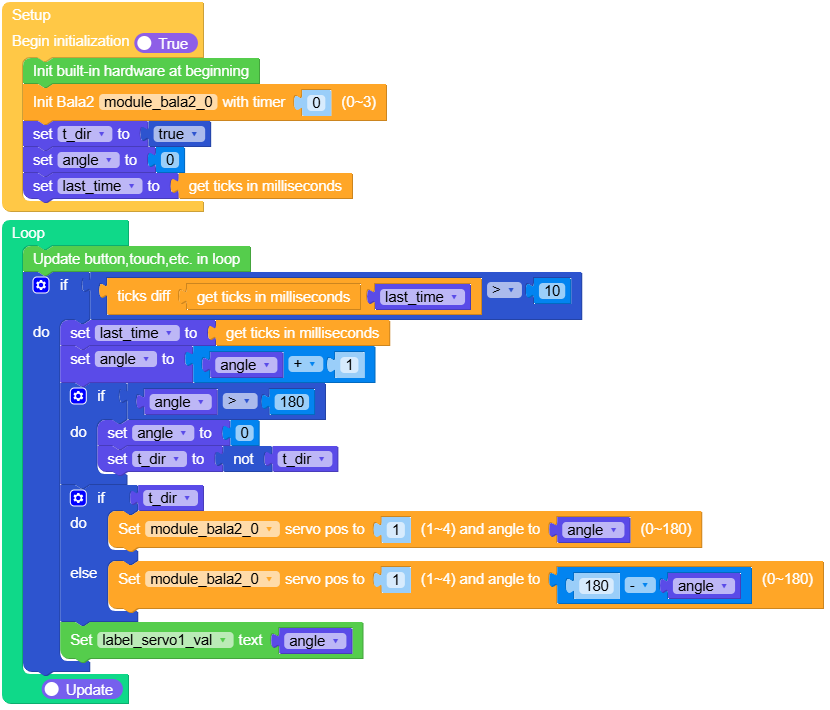
控制舵机 0°~180° 来回转动。
UiFlow2 代码块:
示例输出:
无
电机控制
在 UiFlow2 上打开 motor_control_example.m5f2 项目。
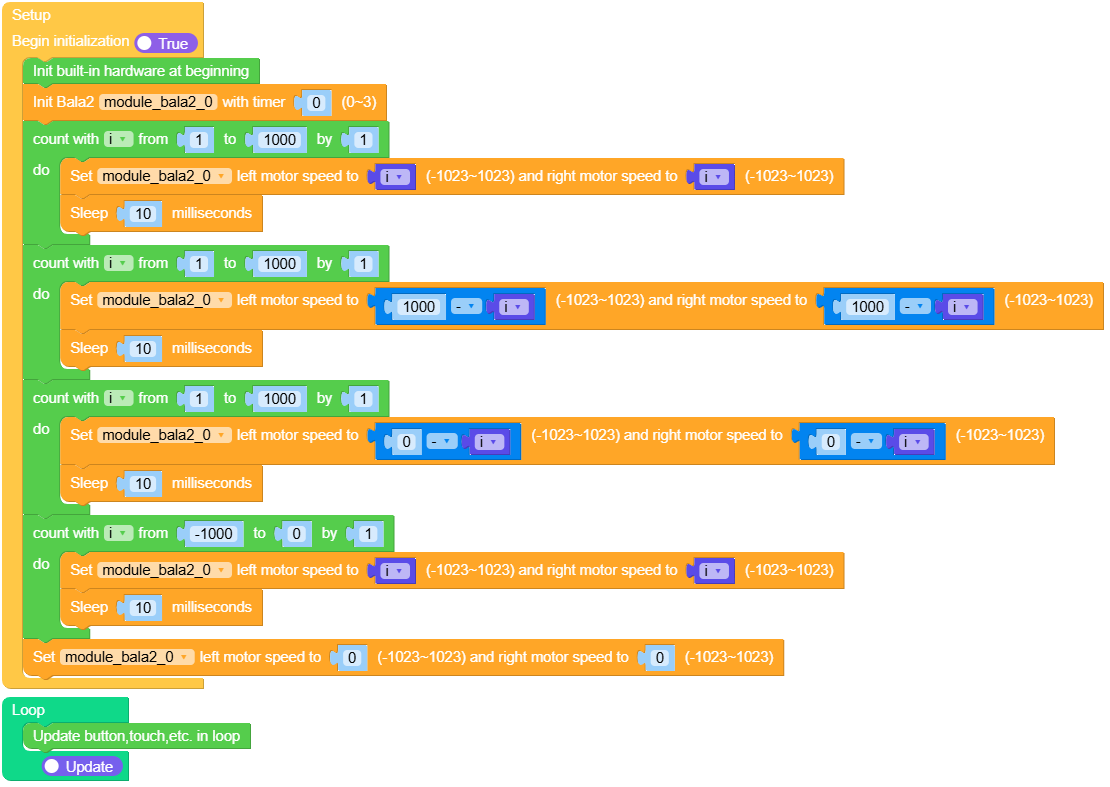
运行程序,小车电机先正转,逐步加速至最大速度,然后逐步减速至停止。随后,电机反转,同样逐步加速到最大速度,再逐步减速至停止。最后,小车停止运动,电机速度归零。
UiFlow2 代码块:
示例输出:
无
读取编码器
在 UiFlow2 上打开 read_encoder_example.m5f2 项目。
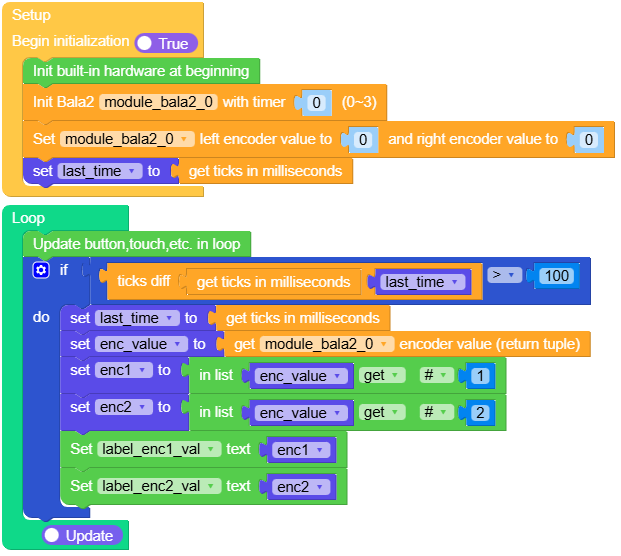
运行程序,用手转动车轮观察屏幕显示。
UiFlow2 代码块:
示例输出:
无
小车控制
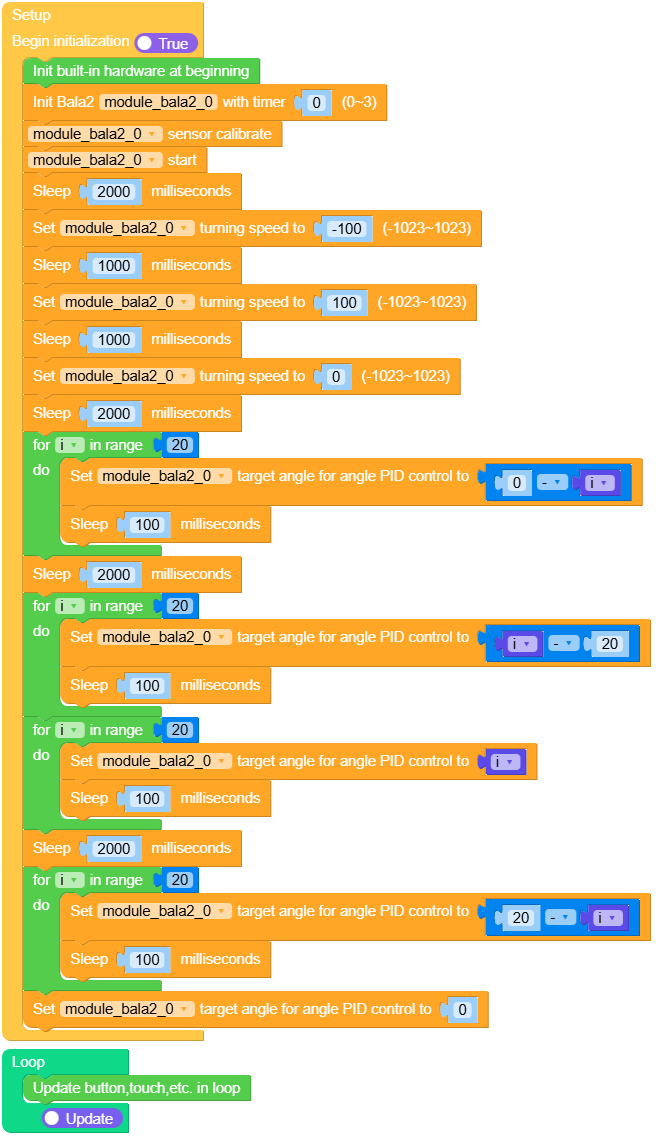
在 UiFlow2 上打开 car_control_example.m5f2 项目。
保存程序到控制器中,侧放小车并开机,等待陀螺仪校准完成后,小车会自动直立保持平衡。随后,它会依次执行左转、右转、前进、后退等动作,最后停止,回到平衡状态。
UiFlow2 代码块:
示例输出:
无
MicroPython 应用示例:
舵机控制
控制舵机 0°~180° 来回转动。
MicroPython 代码块:
1# SPDX-FileCopyrightText: 2025 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8from module import Bala2Module 9import time 10 11 12title0 = None 13label_servo1 = None 14label_servo1_val = None 15module_bala2_0 = None 16t_dir = None 17last_time = None 18angle = None 19 20 21def setup(): 22 global title0, label_servo1, label_servo1_val, module_bala2_0, t_dir, last_time, angle 23 M5.begin() 24 Widgets.fillScreen(0x222222) 25 title0 = Widgets.Title("Bala2 Servo Control", 3, 0xFFFFFF, 0x0000FF, Widgets.FONTS.DejaVu24) 26 label_servo1 = Widgets.Label("Angle:", 54, 85, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 27 label_servo1_val = Widgets.Label("0", 125, 85, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 28 module_bala2_0 = Bala2Module(0) 29 t_dir = True 30 angle = 0 31 last_time = time.ticks_ms() 32 33 34def loop(): 35 global title0, label_servo1, label_servo1_val, module_bala2_0, t_dir, last_time, angle 36 M5.update() 37 if (time.ticks_diff((time.ticks_ms()), last_time)) > 10: 38 last_time = time.ticks_ms() 39 angle = angle + 1 40 if angle > 180: 41 angle = 0 42 t_dir = not t_dir 43 if t_dir: 44 module_bala2_0.set_servo_angle(1, angle) 45 else: 46 module_bala2_0.set_servo_angle(1, 180 - angle) 47 label_servo1_val.setText(str(angle)) 48 49 50if __name__ == "__main__": 51 try: 52 setup() 53 while True: 54 loop() 55 except (Exception, KeyboardInterrupt) as e: 56 try: 57 from utility import print_error_msg 58 59 print_error_msg(e) 60 except ImportError: 61 print("please update to latest firmware")
示例输出:
无
电机控制
运行程序,小车电机先正转,逐步加速至最大速度,然后逐步减速至停止。随后,电机反转,同样逐步加速到最大速度,再逐步减速至停止。最后,小车停止运动,电机速度归零。
MicroPython 代码块:
1# SPDX-FileCopyrightText: 2025 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8from module import Bala2Module 9import time 10 11 12title0 = None 13module_bala2_0 = None 14i = None 15 16 17def setup(): 18 global title0, module_bala2_0, i 19 M5.begin() 20 Widgets.fillScreen(0x222222) 21 title0 = Widgets.Title("Bala2 Motor Control", 3, 0xFFFFFF, 0x0000FF, Widgets.FONTS.DejaVu24) 22 23 module_bala2_0 = Bala2Module(0) 24 for i in range(1, 1001): 25 module_bala2_0.set_motor_speed(i, i) 26 time.sleep_ms(10) 27 for i in range(1, 1001): 28 module_bala2_0.set_motor_speed(1000 - i, 1000 - i) 29 time.sleep_ms(10) 30 for i in range(1, 1001): 31 module_bala2_0.set_motor_speed(0 - i, 0 - i) 32 time.sleep_ms(10) 33 for i in range(-1000, 1): 34 module_bala2_0.set_motor_speed(i, i) 35 time.sleep_ms(10) 36 module_bala2_0.set_motor_speed(0, 0) 37 38 39def loop(): 40 global title0, module_bala2_0, i 41 M5.update() 42 43 44if __name__ == "__main__": 45 try: 46 setup() 47 while True: 48 loop() 49 except (Exception, KeyboardInterrupt) as e: 50 try: 51 from utility import print_error_msg 52 53 print_error_msg(e) 54 except ImportError: 55 print("please update to latest firmware")
示例输出:
无
读取编码器
运行程序,用手转动车轮观察屏幕显示。
MicroPython 代码块:
1# SPDX-FileCopyrightText: 2025 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8from module import Bala2Module 9import time 10 11 12title0 = None 13label_enc1 = None 14label_enc2 = None 15label_enc1_val = None 16label_enc2_val = None 17module_bala2_0 = None 18last_time = None 19enc_value = None 20enc1 = None 21enc2 = None 22 23 24def setup(): 25 global \ 26 title0, \ 27 label_enc1, \ 28 label_enc2, \ 29 label_enc1_val, \ 30 label_enc2_val, \ 31 module_bala2_0, \ 32 last_time, \ 33 enc_value, \ 34 enc1, \ 35 enc2 36 M5.begin() 37 Widgets.fillScreen(0x222222) 38 title0 = Widgets.Title("Bala2 Encoder Read", 3, 0xFFFFFF, 0x0000FF, Widgets.FONTS.DejaVu24) 39 label_enc1 = Widgets.Label("Enc1", 54, 85, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 40 label_enc2 = Widgets.Label("Enc2", 208, 85, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 41 label_enc1_val = Widgets.Label("0", 50, 125, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 42 label_enc2_val = Widgets.Label("0", 202, 125, 1.0, 0xFFFFFF, 0x222222, Widgets.FONTS.DejaVu18) 43 module_bala2_0 = Bala2Module(0) 44 module_bala2_0.set_encoder_value(0, 0) 45 last_time = time.ticks_ms() 46 47 48def loop(): 49 global \ 50 title0, \ 51 label_enc1, \ 52 label_enc2, \ 53 label_enc1_val, \ 54 label_enc2_val, \ 55 module_bala2_0, \ 56 last_time, \ 57 enc_value, \ 58 enc1, \ 59 enc2 60 M5.update() 61 if (time.ticks_diff((time.ticks_ms()), last_time)) > 100: 62 last_time = time.ticks_ms() 63 enc_value = module_bala2_0.get_encoder_value() 64 enc1 = enc_value[0] 65 enc2 = enc_value[1] 66 label_enc1_val.setText(str(enc1)) 67 label_enc2_val.setText(str(enc2)) 68 69 70if __name__ == "__main__": 71 try: 72 setup() 73 while True: 74 loop() 75 except (Exception, KeyboardInterrupt) as e: 76 try: 77 from utility import print_error_msg 78 79 print_error_msg(e) 80 except ImportError: 81 print("please update to latest firmware")
示例输出:
无
小车控制
保存程序到控制器中,侧放小车并开机,等待陀螺仪校准完成后,小车会自动直立保持平衡。随后,它会依次执行左转、右转、前进、后退等动作,最后停止,回到平衡状态。
MicroPython 代码块:
1# SPDX-FileCopyrightText: 2025 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8from module import Bala2Module 9import time 10 11 12title0 = None 13module_bala2_0 = None 14i = None 15 16 17def setup(): 18 global title0, module_bala2_0, i 19 M5.begin() 20 Widgets.fillScreen(0x222222) 21 title0 = Widgets.Title("Self-Balancing Robot", 3, 0xFFFFFF, 0x0000FF, Widgets.FONTS.DejaVu24) 22 module_bala2_0 = Bala2Module(0) 23 module_bala2_0.calibrate() 24 module_bala2_0.start() 25 time.sleep_ms(2000) 26 module_bala2_0.set_turn_speed(-100) 27 time.sleep_ms(1000) 28 module_bala2_0.set_turn_speed(100) 29 time.sleep_ms(1000) 30 module_bala2_0.set_turn_speed(0) 31 time.sleep_ms(2000) 32 for i in range(20): 33 module_bala2_0.set_angle_pid_target(0 - i) 34 time.sleep_ms(100) 35 time.sleep_ms(2000) 36 for i in range(20): 37 module_bala2_0.set_angle_pid_target(i - 20) 38 time.sleep_ms(100) 39 for i in range(20): 40 module_bala2_0.set_angle_pid_target(i) 41 time.sleep_ms(100) 42 time.sleep_ms(2000) 43 for i in range(20): 44 module_bala2_0.set_angle_pid_target(20 - i) 45 time.sleep_ms(100) 46 module_bala2_0.set_angle_pid_target(0) 47 48 49def loop(): 50 global title0, module_bala2_0, i 51 M5.update() 52 53 54if __name__ == "__main__": 55 try: 56 setup() 57 while True: 58 loop() 59 except (Exception, KeyboardInterrupt) as e: 60 try: 61 from utility import print_error_msg 62 63 print_error_msg(e) 64 except ImportError: 65 print("please update to latest firmware")
示例输出:
无
API应用
Bala2Module
- class module.bala2.Bala2Module(timer_id=0)
创建一个 Bala2Module 对象
- 参数:
timer_id (int) – 定时器 ID 从 0 到 3(使用定时器周期性地调用平衡控制程序)。
UiFlow2 代码块:

MicroPython 代码块:
from module import Bala2Module module_bala2_0 = Bala2Module(timer_id = 0)
- calibrate()
校准传感器
UiFlow2 代码块:

MicroPython 代码块:
module_bala2_0.calibrate()
- set_motor_speed(left, right)
设置电机转速
UiFlow2 代码块:

MicroPython 代码块:
module_bala2_0.set_motor_speed(left, right)
- set_encoder_value(left, right)
设置编码器数值
UiFlow2 代码块:

MicroPython 代码块:
module_bala2_0.set_encoder_value(left, right)
- get_encoder_value()
左、右编码器值以二元组的形式返回。
UiFlow2 代码块:

MicroPython 代码块:
module_bala2_0.get_encoder_value()
- set_servo_angle(pos, angle)
设置舵机角度
UiFlow2 代码块:

MicroPython 代码块:
module_bala2_0.set_servo_angle(pos, angle)
- start()
开始直立平衡控制
UiFlow2 代码块:

MicroPython 代码块:
module_bala2_0.start()
- stop()
停止平衡控制
UiFlow2 代码块:

MicroPython 代码块:
module_bala2_0.stop()
- get_angle()
获取小车倾角
- 返回:
小车倾角
- 返回类型:
小车运行 start() 时数据才有效
UiFlow2 代码块:

MicroPython 代码块:
module_bala2_0.get_angle()
- set_angle_pid(kp, ki, kd)
设置角度环 PID 参数
UiFlow2 代码块:

MicroPython 代码块:
module_bala2_0.set_angle_pid(kp, ki, kd)
- get_angle_pid()
角度环 PID 参数以三元组的形式返回。
UiFlow2 代码块:

MicroPython 代码块:
module_bala2_0.get_angle_pid()
- set_angle_pid_target(angle=0)
设置角度环 PID 控制目标
- 参数:
angle (float) – 角度环控制目标角度,默认为0。
UiFlow2 代码块:

MicroPython 代码块:
module_bala2_0.set_angle_pid_target(angle)
- get_angle_pid_target()
获取角度环 PID 控制目标。
- 返回:
角度环 PID 控制目标。
- 返回类型:
UiFlow2 代码块:

MicroPython 代码块:
module_bala2_0.get_angle_pid_target()
- set_speed_pid(kp, ki, kd)
设置速度环 PID 控制参数。
UiFlow2 代码块:

MicroPython 代码块:
module_bala2_0.set_speed_pid(kp, ki, kd)
- get_speed_pid()
速度环 PID 参数以三元组的形式返回。
UiFlow2 代码块:

MicroPython 代码块:
module_bala2_0.get_speed_pid()
- set_speed_pid_target(speed=0)
设置速度环 PID 控制目标。
- 参数:
speed (float) – 速度环 PID 控制目标,默认为0。
UiFlow2 代码块:

MicroPython 代码块:
module_bala2_0.set_speed_pid_target(speed)
- get_speed_pid_target()
获取速度环 PID 控制目标。
- 返回:
速度环 PID 控制目标。
- 返回类型:
UiFlow2 代码块:

MicroPython 代码块:
module_bala2_0.get_speed_pid_target()
