Motion
Atomic Motion Base is a servo and DC motor driver designed specifically for the ATOM series controllers. It integrates an STM32 control chip internally and uses I2C communication for control. Atomic Motion Base provides 4 servo channels and 2 DC motor interfaces, offering convenience for scenarios that require control of multiple servos or motor drivers, such as multi-axis servo robotic arms or small car motor control.
Support the following products:

Micropython Example:
1# SPDX-FileCopyrightText: 2024 M5Stack Technology CO LTD 2# 3# SPDX-License-Identifier: MIT 4 5import os, sys, io 6import M5 7from M5 import * 8from hardware import * 9from base import Motion 10 11 12i2c0 = None 13motion = None 14 15 16def setup(): 17 global i2c0, motion 18 19 M5.begin() 20 i2c0 = I2C(0, scl=Pin(39), sda=Pin(38), freq=100000) 21 motion = Motion(i2c0, 0x38) 22 motion.set_servo_angle(1, 70) 23 motion.set_motor_speed(1, 46) 24 print(motion.get_servo_angle(1)) 25 26 27def loop(): 28 global i2c0, motion 29 M5.update() 30 31 32if __name__ == "__main__": 33 try: 34 setup() 35 while True: 36 loop() 37 except (Exception, KeyboardInterrupt) as e: 38 try: 39 from utility import print_error_msg 40 41 print_error_msg(e) 42 except ImportError: 43 print("please update to latest firmware")
UIFLOW2 Example:
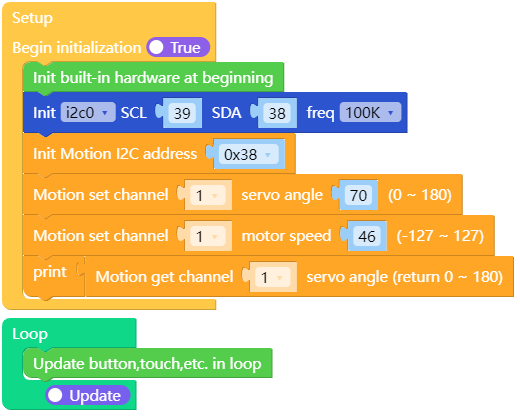
atoms3_lite_motion_base_example.m5f2
class Motion
Constructors
- Motion(i2c, address)
Initialize the Servo8.
i2c: I2C port to use.address: I2C address of the servo8.
UIFLOW2:

Methods
- Motion.get_servo_angle(ch)
Get the angle of the servo.
ch: Servo channel (1 to 4).
UIFLOW2:

- Motion.set_servo_angle(ch, angle)
Set the angle of the servo.
ch: Servo channel (1 to 4).angle: Angle of the servo (0 to 180).
UIFLOW2:

- Motion.get_servo_pulse(ch)
Get the pulse width of the servo.
ch: Servo channel (1 to 4).
UIFLOW2:

- Motion.write_servo_pulse(ch, pulse)
Set the pulse width of the servo.
ch: Servo channel (1 to 4).pulse: Pulse width of the servo (500 to 2500).
UIFLOW2:

- Motion.get_motor_speed(ch)
Get the speed of the motor.
ch: Motor channel (1 or 2).
UIFLOW2:

- Motion.set_motor_speed(ch, speed)
Set the speed of the motor.
ch: Motor channel (1 or 2).speed: Speed of the motor (-127 to 127).
UIFLOW2:
